

Binocular vision-based unmanned aerial vehicle aerial autonomous refueling fast docking navigation method
A technology of binocular vision and navigation method, which is applied in image data processing, instrumentation, calculation, etc., can solve the problem that the matching accuracy rate needs to be improved, achieve the effect of accurate and useful feature points, high matching accuracy rate, and increase the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
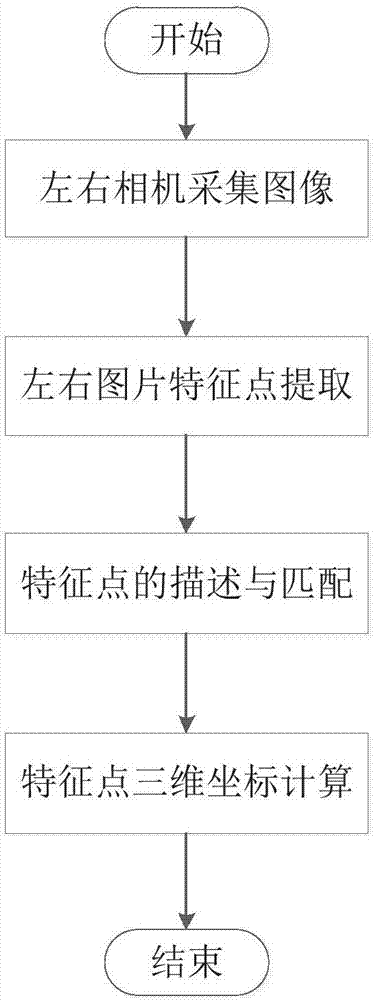
[0059] The present invention provides a binocular vision-based autonomous refueling fast docking navigation method for UAVs in the air, see figure 1 ,Specific steps are as follows:
[0060] Step 1.1: Fix two cameras of the same model on the left and right sides of the drone, adjust the angles to form a binocular vision system, and calibrate the binocular vision system using Zhang Zhengyou’s calibration method to obtain the binocular vision The internal parameters and external parameters of the system, and then install filters that only allow a single color to pass through the lenses of the left and right cameras.
[0061] Step 1.2: Install an optical marker light on the circumference of the refueling drogue sleeve of the fuel dispenser. The light emitting color of the optical marker light is the same as the color allowed by the optical filter installed on the camera.
[0062] Step 1.3: Use the binocular vision system described in step 1.1 to take pictures of the refueling dr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More