Low-spatial-domain collision avoidance system and method for unmanned aerial vehicle
A conflict avoidance and drone technology, applied in the field of conflict avoidance systems based on low-altitude drones, can solve problems such as drone collisions, viewing angle deviations, and fast drone flight speeds
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings and embodiments. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them.
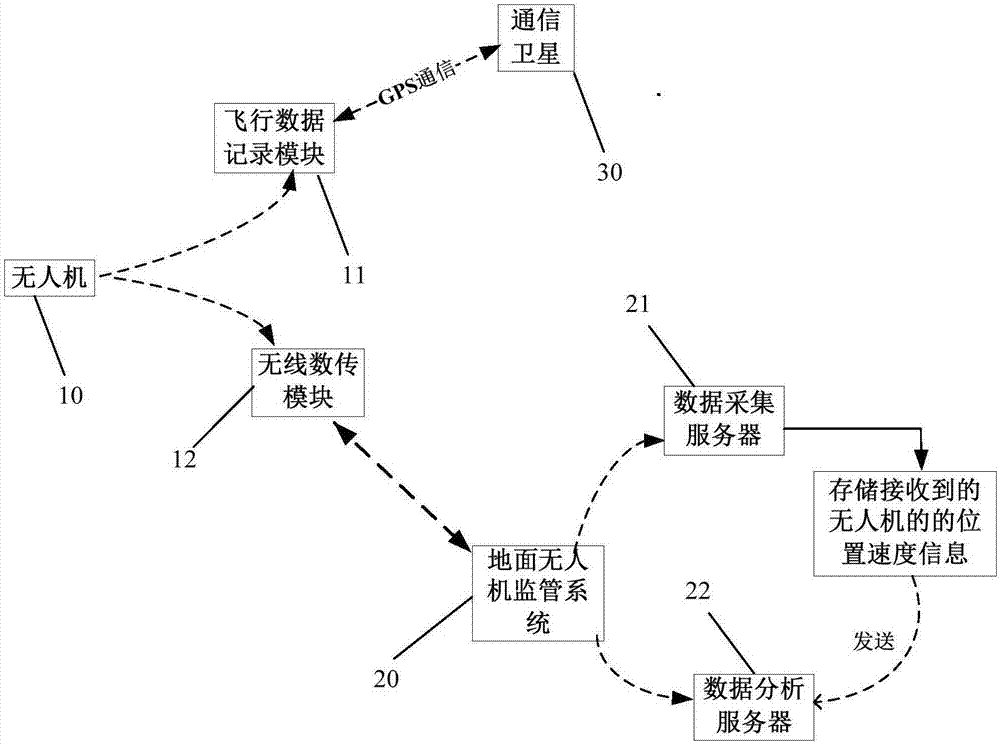
[0029] see figure 1 , is a structural block diagram of a low airspace UAV conflict avoidance system, including a flight data recording module 11 and a wireless data transmission module 12 arranged in each UAV 10, and the UAV through the wireless data transmission module 12 A ground-based UAV surveillance system for exchanging data20;
[0030] The flight data recording module 11 includes a GPS module for receiving the GPS positioning information of the communication satellite 30 and an acceleration sensor for recording the flying speed of the drone;
[0031] The ground UAV monitoring system 30 includes a data collection server 21 and a data analysis server 22; the data collection server 21 is u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More