Binocular vision based dual-mode intelligent ball picking robot system
A robotic system and binocular vision technology, applied in the field of robotics, can solve problems such as the inability to search and identify spheres in a wide range, the inability to control long-distance, and the limited field of view of the camera, so as to improve the efficiency of ball picking, easy to obtain materials, and rich applications. scene effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
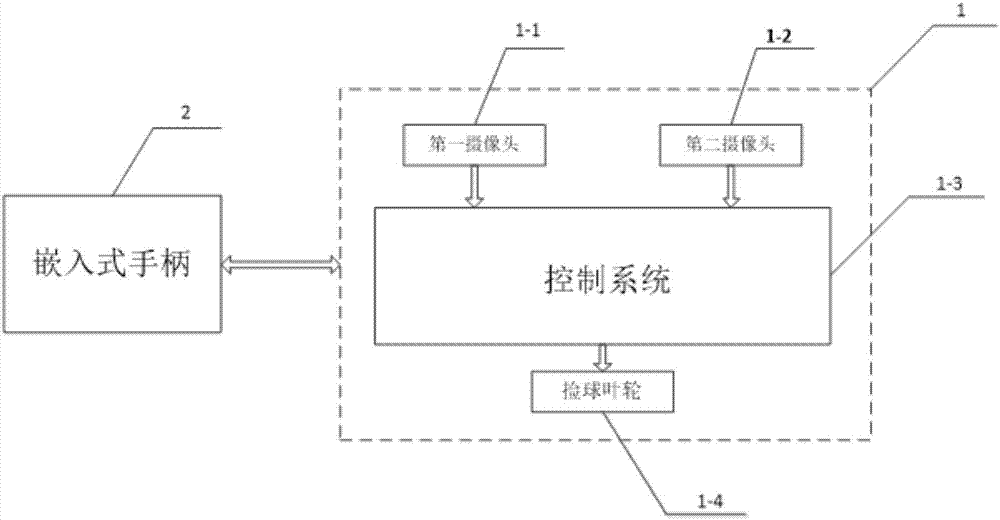
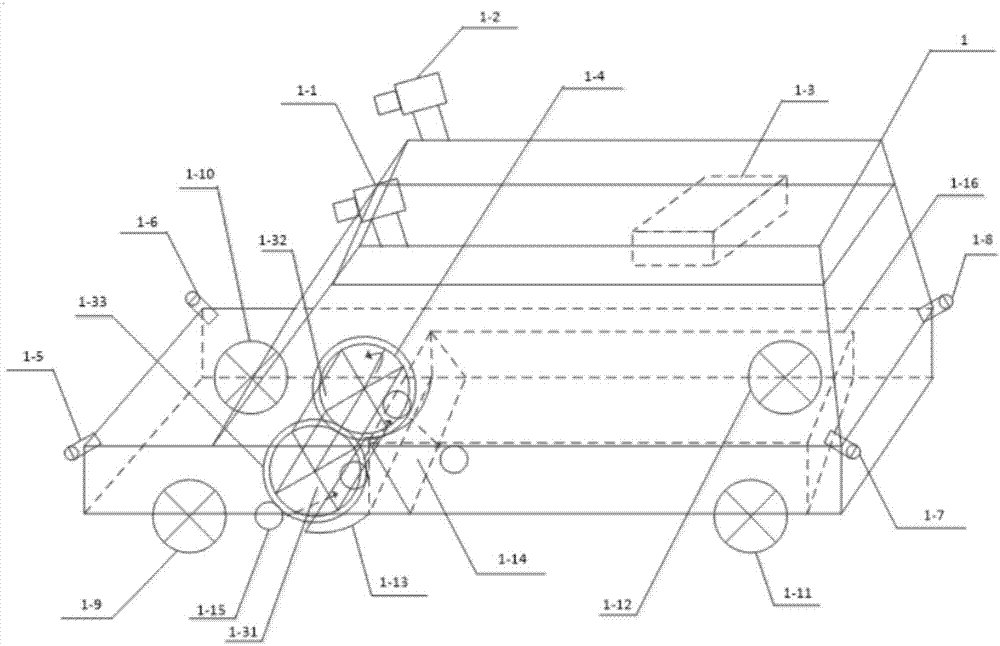
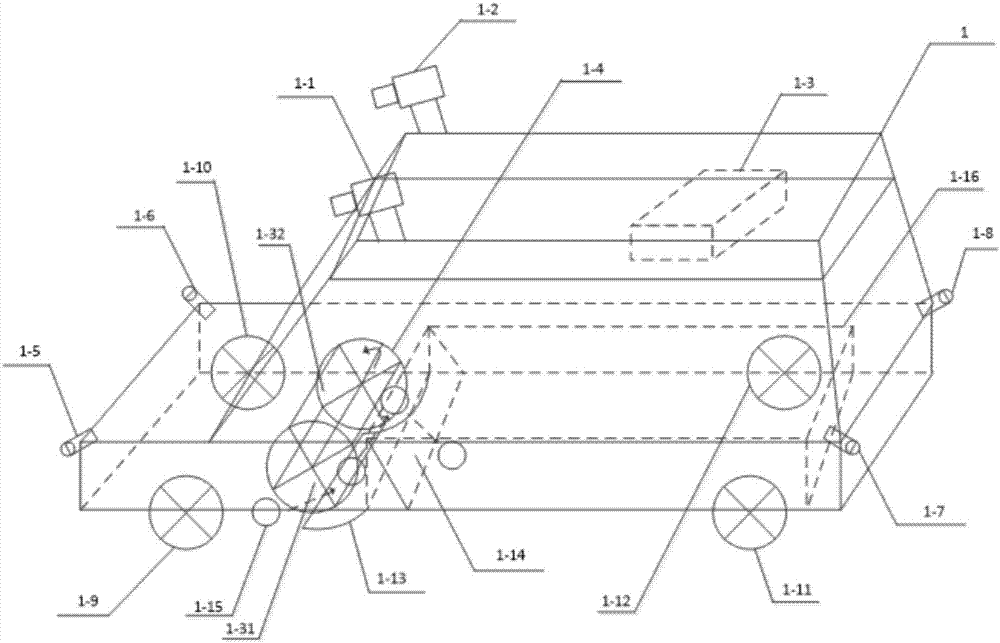
[0036] Such as Figure 1 to Figure 6 As shown, the dual-mode intelligent ball-picking robot system based on binocular vision includes a dual-mode intelligent ball-picking robot 1 based on binocular vision and an embedded handle 2, and the dual-mode intelligent ball-picking robot 1 based on binocular vision includes There is a square base driven by four wheels (1-9, 1-10, 1-11, 1-12), and the bottom of the base has a cavity capable of accommodating the ball picking part 1-4, which is adjacent to the ball picking part 1- 4 and set on the side of the ball picking part 1-4 close to the tail of the robot 1, there is a storage box 1-16, and a control part that can control its travel route and pick up the ball is also provided in the square base, and the square base is close to the ball picking part Two cameras (1-1, 1-2) with an included angle of 30° are provided on both sides of one end of 1-4, and at least one sensor (1-5, 1-2) is provided at the bottom of each corner of the squar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More