

Intelligent moving method and device, robot and storage medium
An intelligent and mobile technology, applied in the fields of instruments, motor vehicles, transportation and packaging, can solve problems such as determining the movement trajectory, and achieve the effect of improving mobile efficiency, realizing automatic movement, and improving flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
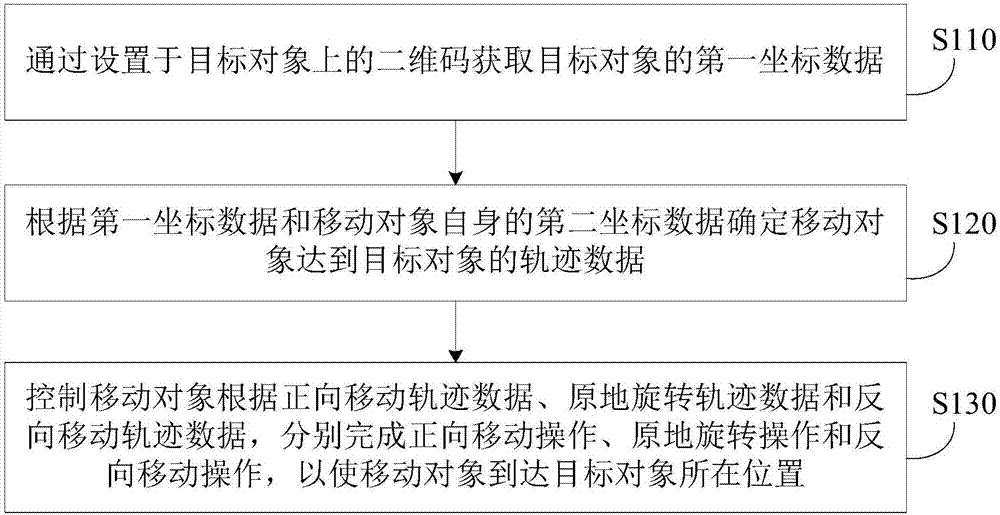
[0037] figure 1 It is a flow chart of an intelligent mobile method provided by Embodiment 1 of the present invention. The intelligent moving method provided in this embodiment is applicable to the situation where the moving object determines the moving stop point and the moving track by itself. Among them, the moving object is a robot with a moving function. A robot is a machine device that can perform work automatically. It can accept human command, run pre-programmed programs, and act according to principles formulated with artificial intelligence technology. For example, mobile forklifts and equipment with robotic arms are examples of robots. Further, the smart mobile method provided in this embodiment can be executed by a smart mobile device, which can be implemented by means of software and / or hardware, and integrated into a mobile object. Specifically, refer to figure 1 , the intelligent mobile method provided in this embodiment specifically includes:
[0038] S110...
Embodiment 2
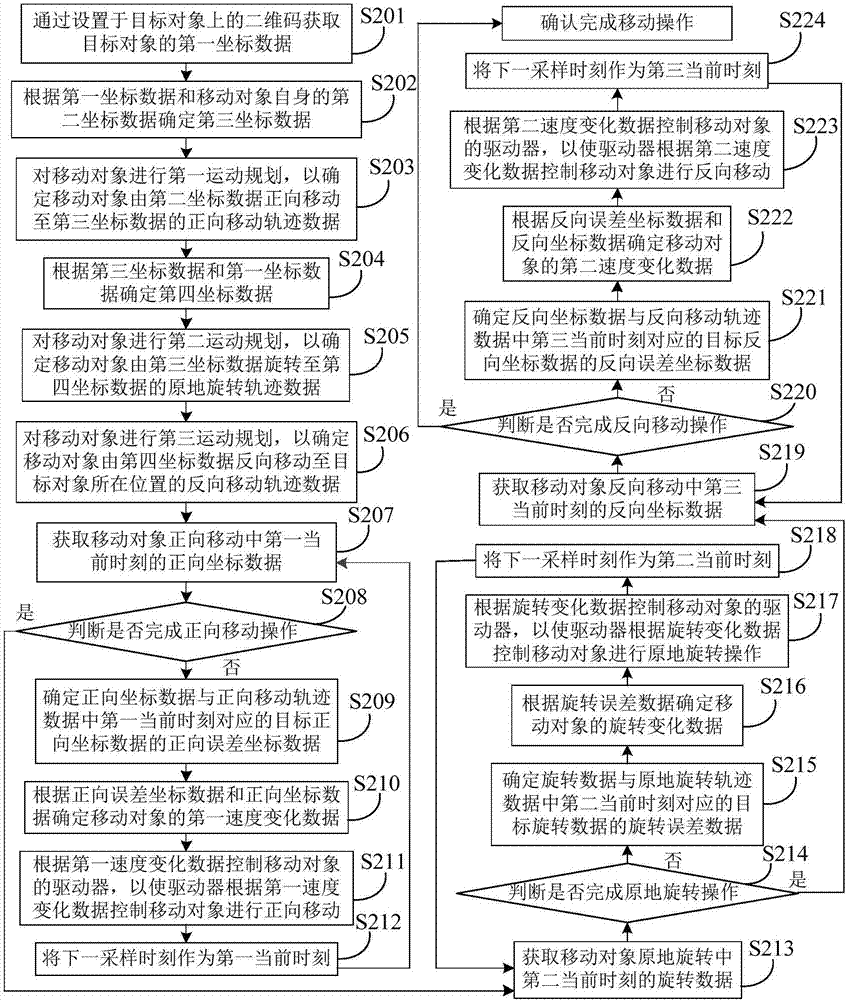
[0061] Figure 2a It is a flow chart of an intelligent mobile method provided by Embodiment 2 of the present invention. This embodiment is embodied on the basis of the above-mentioned embodiments. In this embodiment, both the first coordinate data and the second coordinate data include position coordinates and angle coordinates. refer to Figure 2a , the intelligent mobile method provided in this embodiment specifically includes:
[0062] S201. Acquire first coordinate data of a target object through a two-dimensional code set on the target object.
[0063] In this embodiment, it is assumed that the moving object is provided with a first image acquisition device and a second image acquisition device, wherein the first image acquisition device can acquire the moving picture in front of the moving object, and the second image acquisition device can acquire the moving image in front of the moving object. A moving image of what is behind the object. The first image acquisitio...
Embodiment 3
[0221] image 3 It is a schematic structural diagram of an intelligent mobile device provided by Embodiment 3 of the present invention. refer to image 3 , the smart mobile device provided in this embodiment specifically includes: a data acquisition module 301 , a trajectory determination module 302 and a movement control module 303 .
[0222] Among them, the data acquisition module 301 is used to acquire the first coordinate data of the target object through the two-dimensional code arranged on the target object; the track determination module 302 is used to determine the coordinate data according to the first coordinate data and the second coordinate data of the moving object itself. The moving object reaches the trajectory data of the target object, and the trajectory data includes: forward moving trajectory data, in situ rotation trajectory data and reverse moving trajectory data; the movement control module 303 is used to control the moving object according to the forwar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More