

Method of designing household sweeping robot based on deep reinforcement learning
A sweeping robot, enhanced learning technology, applied in the direction of instruments, two-dimensional position/channel control, vehicle position/route/altitude control, etc. The effect of versatility and task mobility, saving manpower engineering, and reducing the amount of engineering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0027] The present invention is a design method of a household sweeping robot based on deep reinforcement learning. The working process of the sweeping robot is as follows:
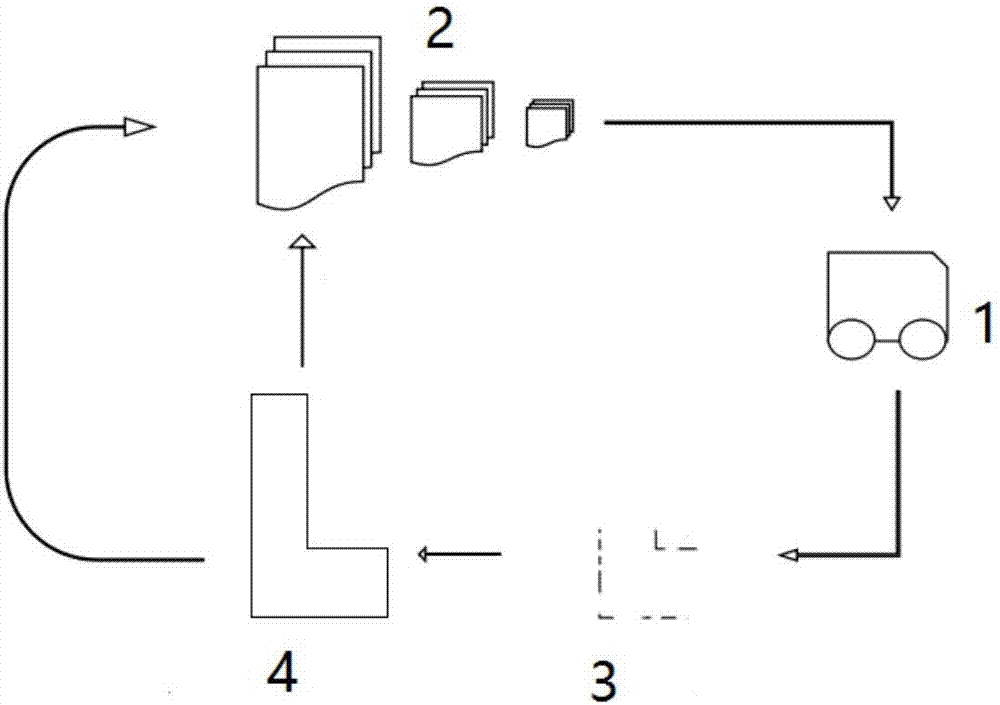
[0028] figure 1 As shown, it specifically includes the following steps:
[0029] Step 1. The sweeping robot collects the original image data through the laser radar. The data refers to the distance from the laser radar to the obstacle at each coordinate angle on the polar coordinate system established with the laser radar as the origin and the horizontal plane as the plane. After the sweeping robot decodes the data, it sends the original data back to the PC through the wireless serial port;
[0030] Step 2. Through the BREEZYSLAM algorithm library, the system performs feature extraction on the original data obtained in step 1, calculates the transformat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More