

Wave guide direction control method based on sweep frequency multi-channel electromagnetic ultrasonic wave guide device
An ultrasonic guided wave and direction control technology, which is applied in the generation of ultrasonic/sonic/infrasonic waves, analysis materials, instruments, etc., can solve the problems of inability to control the direction of guided waves, remote online monitoring, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
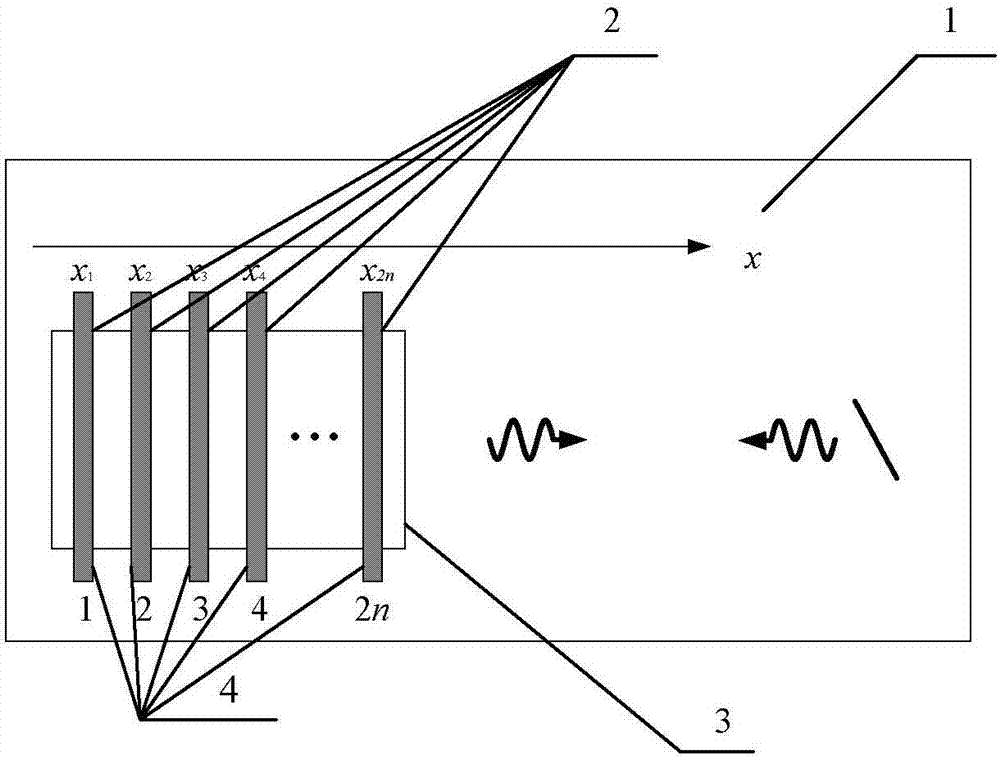
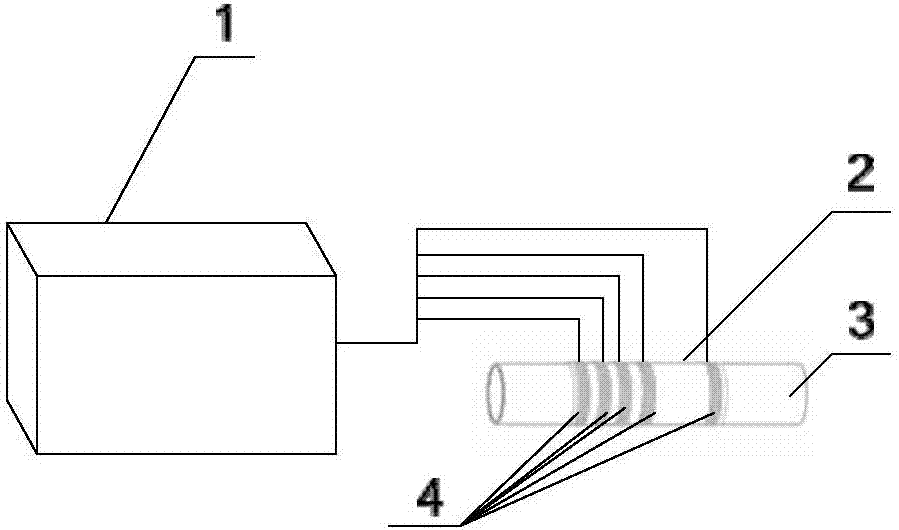
[0020] Specific implementation mode 1: a method for controlling the guiding direction of a wave based on a frequency-sweeping multi-channel electromagnetic ultrasonic wave guiding device, such as figure 1 As shown, the frequency-sweeping multi-channel ultrasonic guided wave device includes a multi-channel ultrasonic guided wave transmitting and receiving device 1, an iron-cobalt alloy strip 2, a test piece 3 and a transmitting coil array 4, and the iron-cobalt alloy strip 2 is tightened by applying pressure or bonding. Attached to the surface of the test piece 3, the transmitting coil array 4 is located on the surface of the iron-cobalt alloy strip 2, one end of each transmitting coil in the transmitting coil array 4 is connected to one transmitting channel of the multi-channel ultrasonic guided wave transmitting and receiving device 1, and the other is grounded, and the iron The cobalt alloy strip 2 and the transmitting coil array 4 form a transducer. In order to excite ultras...
specific Embodiment approach 2
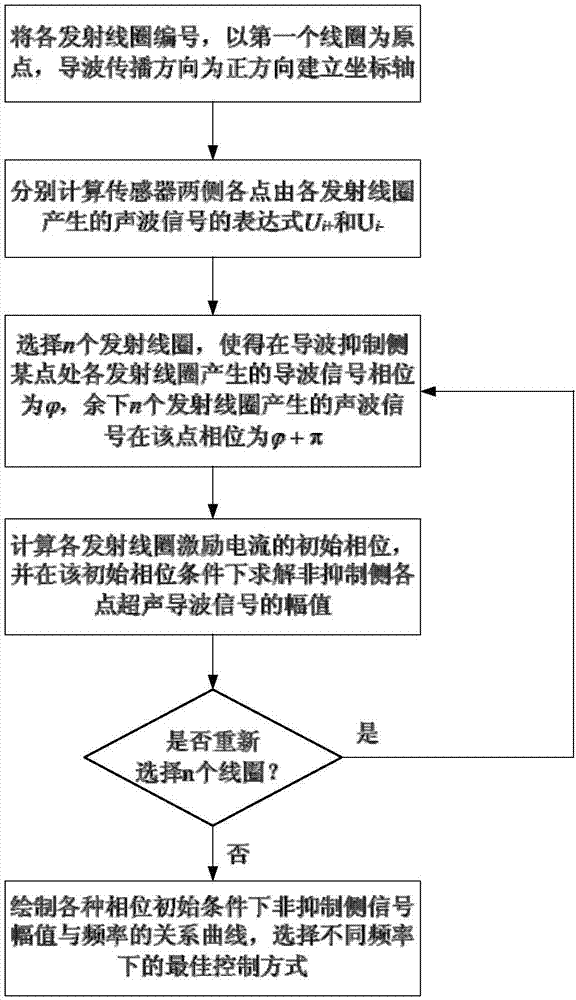
[0028] Specific embodiment two: the difference between this embodiment and specific embodiment one is: the coordinate axis described in step two is the transmitting coil T 1 is the origin, and the direction of guided wave propagation is the positive direction, and the corresponding coordinates of each transmitting coil are x 1 , x 2 ,...,x 2n , where x 1 =0,x i is the distance from the i-th coil to the first coil, i=1, 2, 3, . . . , 2n. ; Other steps and parameters are the same as in the first embodiment.
specific Embodiment approach 3
[0029] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: in step three, the initial phase steps of calculating the excitation current of each coil are as follows:
[0030] (1) Solve the characteristic equation of the guided wave in the tested piece by numerical solution or special software according to the parameters of the tested piece, and obtain the wave velocity c of the guided wave;
[0031] (2), the excitation current signal of each transmitting coil is Wherein i=1, 2,..., 2n, wherein f is the frequency of the guided wave, I is the excitation current amplitude, and t is the guided wave propagation time, is the initial phase;
[0032] (3), for any position x>0, at t 0 time at which the coil T is transmitted i The resulting guided wave signal is U(x) is the amplitude when the ultrasonic guided wave propagates to x;
[0033] For any position x0 time at which the coil T is transmitted i The resulting guided wave...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More