

A mapping method, device and system based on laser radar
A laser radar and map technology, applied in the field of data processing, can solve the problem of low output map accuracy, and achieve the effect of improving registration accuracy and accuracy, high accuracy, and saving space.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
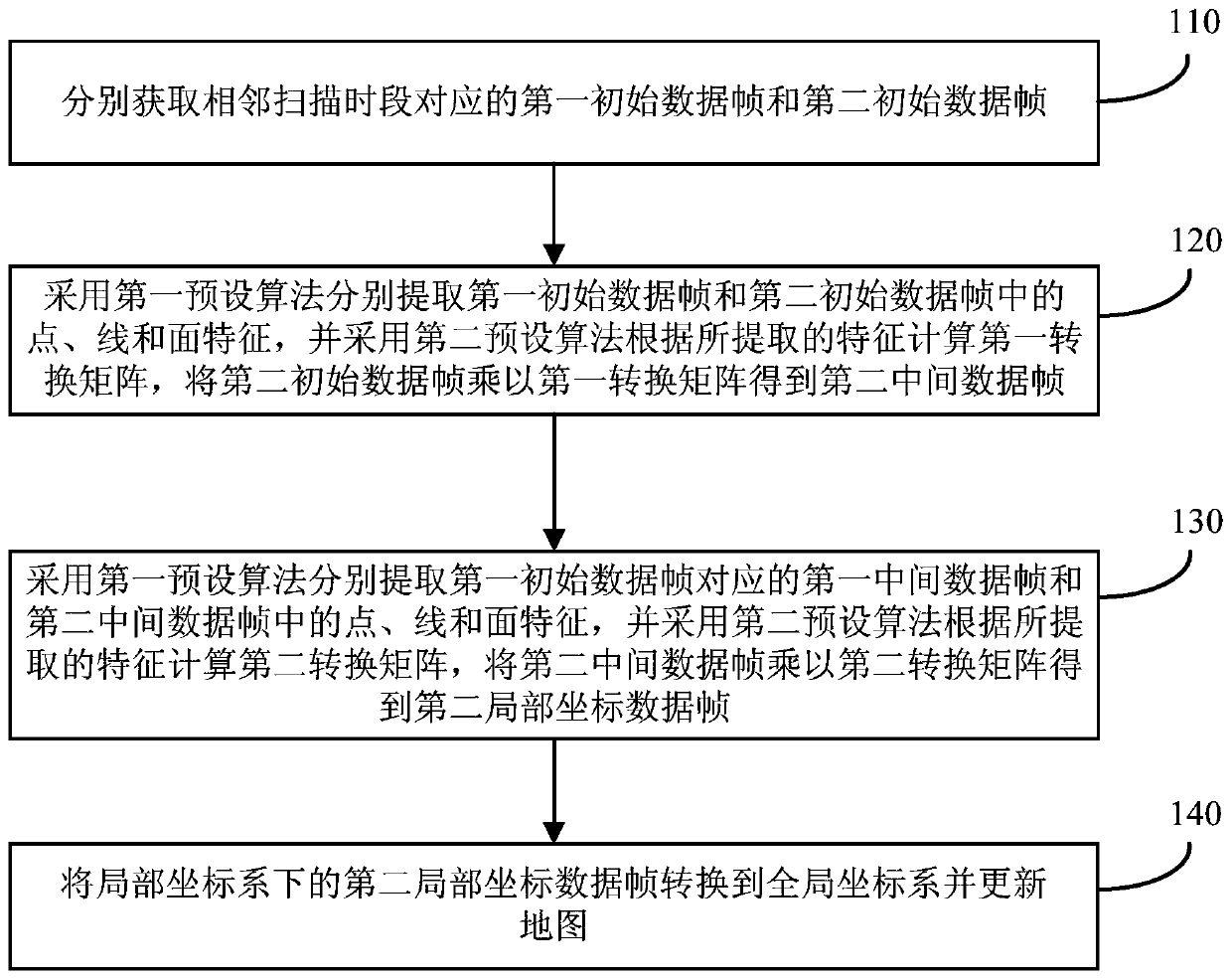
[0033] figure 1 A schematic flow chart of a lidar-based mapping method provided by Embodiment 1 of the present invention, the method can be executed by a lidar-based mapping device, wherein the device can be implemented by software and / or hardware, and generally can be integrated in the laser radar scanning system. Such as figure 1 As shown, the method includes:
[0034] Step 110, respectively acquire the first initial data frame and the second initial data frame corresponding to adjacent scanning periods.
[0035] Wherein, the initial data frame includes the point cloud data scanned by the lidar and the navigation data collected by the inertial measurement unit, the scanning period corresponding to the first initial data frame is before the scanning period corresponding to the second initial data frame, and the The sequence number of the first initial data frame is greater than 1.
[0036]Exemplarily, the lidar-based mapping device can be integrated into the storage contr...
Embodiment 2
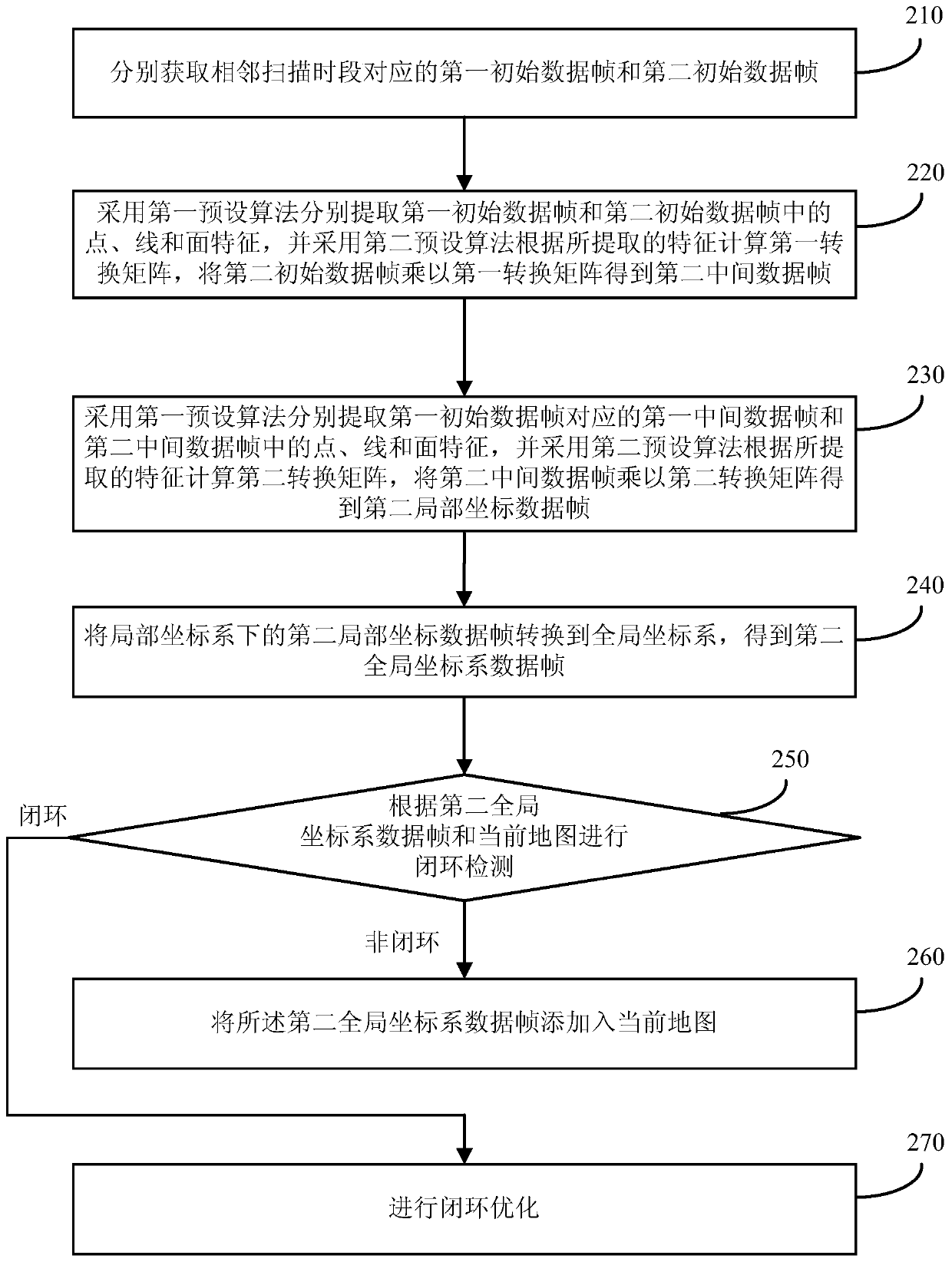
[0060] figure 2 It is a schematic flow chart of a lidar-based mapping method provided by Embodiment 2 of the present invention. This embodiment is optimized based on the above-mentioned embodiments, such as figure 2 As shown, the method of the present embodiment includes the following steps:
[0061] Step 210, respectively acquire the first initial data frame and the second initial data frame corresponding to adjacent scanning periods.
[0062] Wherein, the initial data frame includes the point cloud data scanned by the lidar and the navigation data collected by the inertial measurement unit, the scanning period corresponding to the first initial data frame is before the scanning period corresponding to the second initial data frame, and the The sequence number of the first initial data frame is greater than 1.
[0063] Step 220, using the first preset algorithm to extract the point, line and surface features in the first initial data frame and the second initial data fram...
Embodiment 3
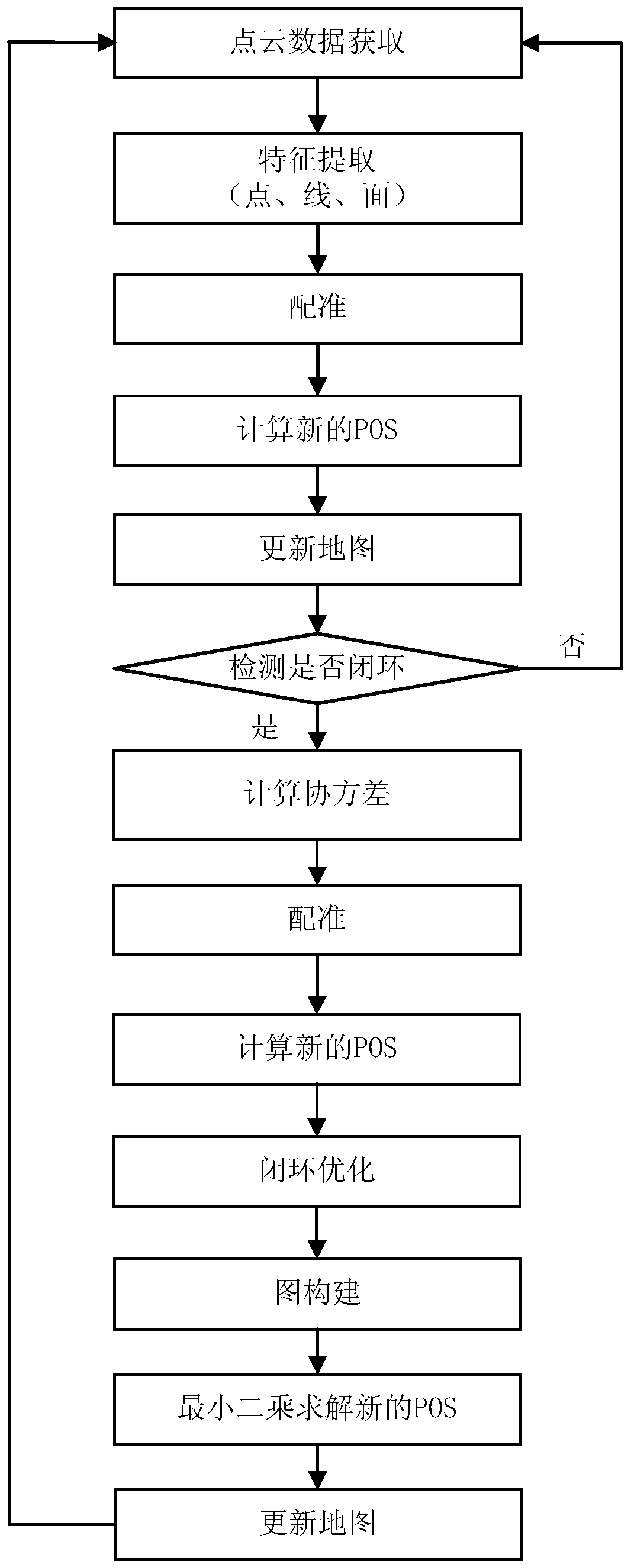
[0090] Embodiment 3 of the present invention provides a specific preferred implementation manner on the basis of the foregoing embodiments. image 3 It is a schematic flowchart of a lidar-based mapping method provided by Embodiment 3 of the present invention.
[0091] (1) Start a thread to collect data packets of lidar from the network port.
[0092] (2) A thread receives the lidar data packet, and converts the data into a point cloud data format containing X, Y, Z and time information after each data reception.
[0093] (3) A thread collects IMU data from the serial port.
[0094] (4) A thread extracts point, line, and surface features according to curvature and performs matching.
[0095] Suppose the current scan data is P k , the next scan data is P k+1 , and both scan data are available, from P k+1 Point, line and surface features are extracted from them, denoted as F k1+1 , F k2+1 and F k3+1 , at P k Find the corresponding point, line and surface features in , de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More