

Multi-degree-of-freedom simple mechanical arm based on artificial muscle (IPMC) driving
A technology of mechanical arm and degree of freedom, applied in the field of robotics, can solve the problems of not being able to satisfy multi-dimensional movement and flexible opening and closing, not satisfying the basic functions of similar human arms at the same time, and having less driving degrees of freedom, etc., to achieve the goal of increasing bending Effects of range, improved agility, and increased rotational drive force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention is described in further detail now in conjunction with accompanying drawing. These drawings are all simplified schematic diagrams, which only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
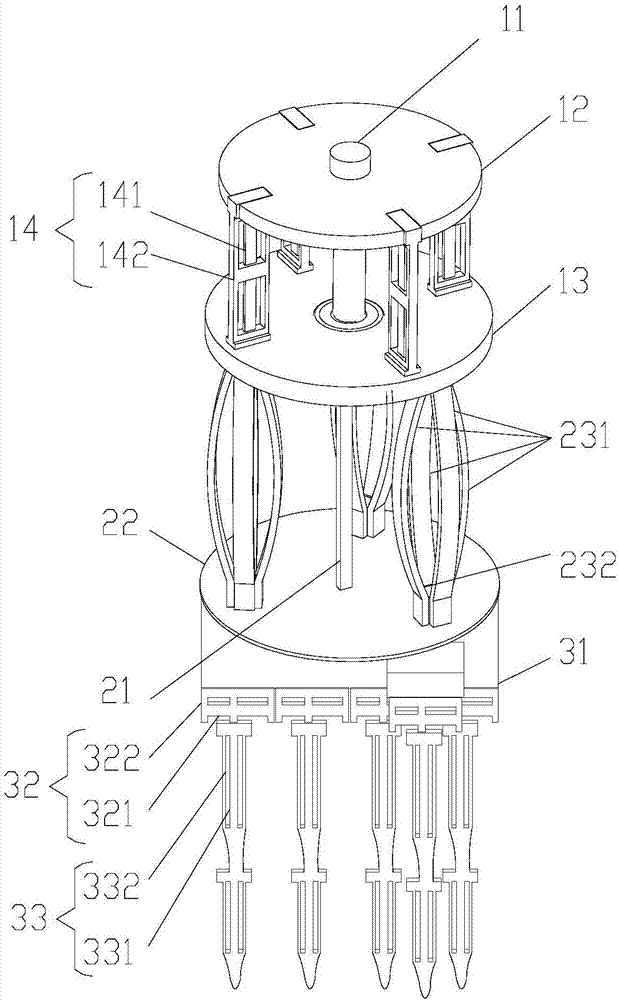
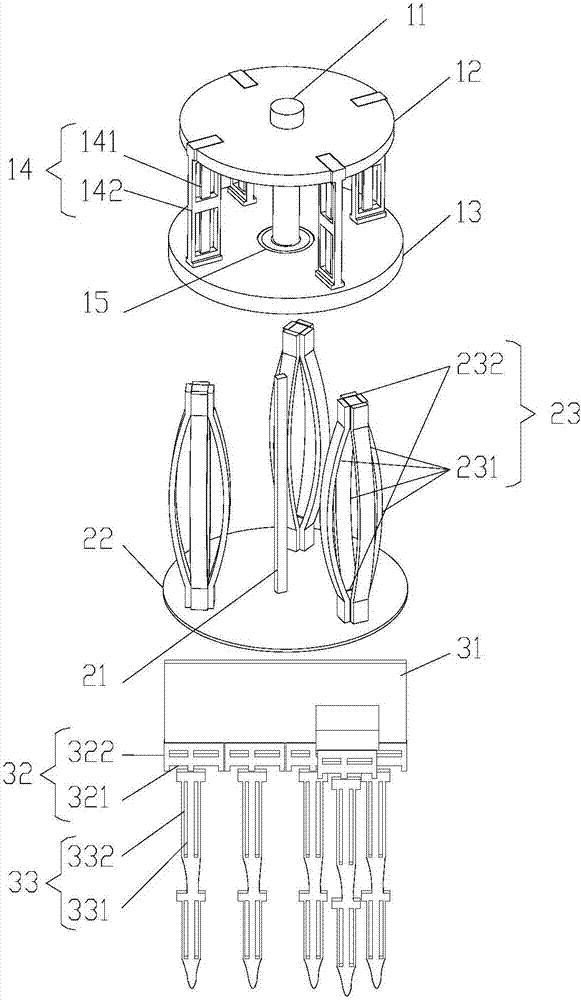
[0024] Such as Figure 1-Figure 6 Shown is a specific embodiment of a multi-degree-of-freedom simple robot arm driven by IPMC based on the present invention, which includes a rotating part, a telescopic part and a grasping part that are connected up and down in sequence, that is, a telescopic part is connected to the lower end of the rotating part, and the telescopic part is The lower end of the part is connected with the grasping part.
[0025]The rotating part includes a fixed shaft 11, a fixed disk 12 fixed at one end of the fixed shaft 11, a rotating disk 13 movably connected at the other end of the fixed shaft 11, and several rotary drive units 14, and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More