

Five degrees of freedom bearingless permanent magnet synchronous motor fuzzy neural network decoupling controller
A technology of fuzzy neural network and permanent magnet synchronous motor, which is applied in the field of decoupling controller to achieve the effect of fast response speed, good dynamic performance, and simple and easy-to-understand principle.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
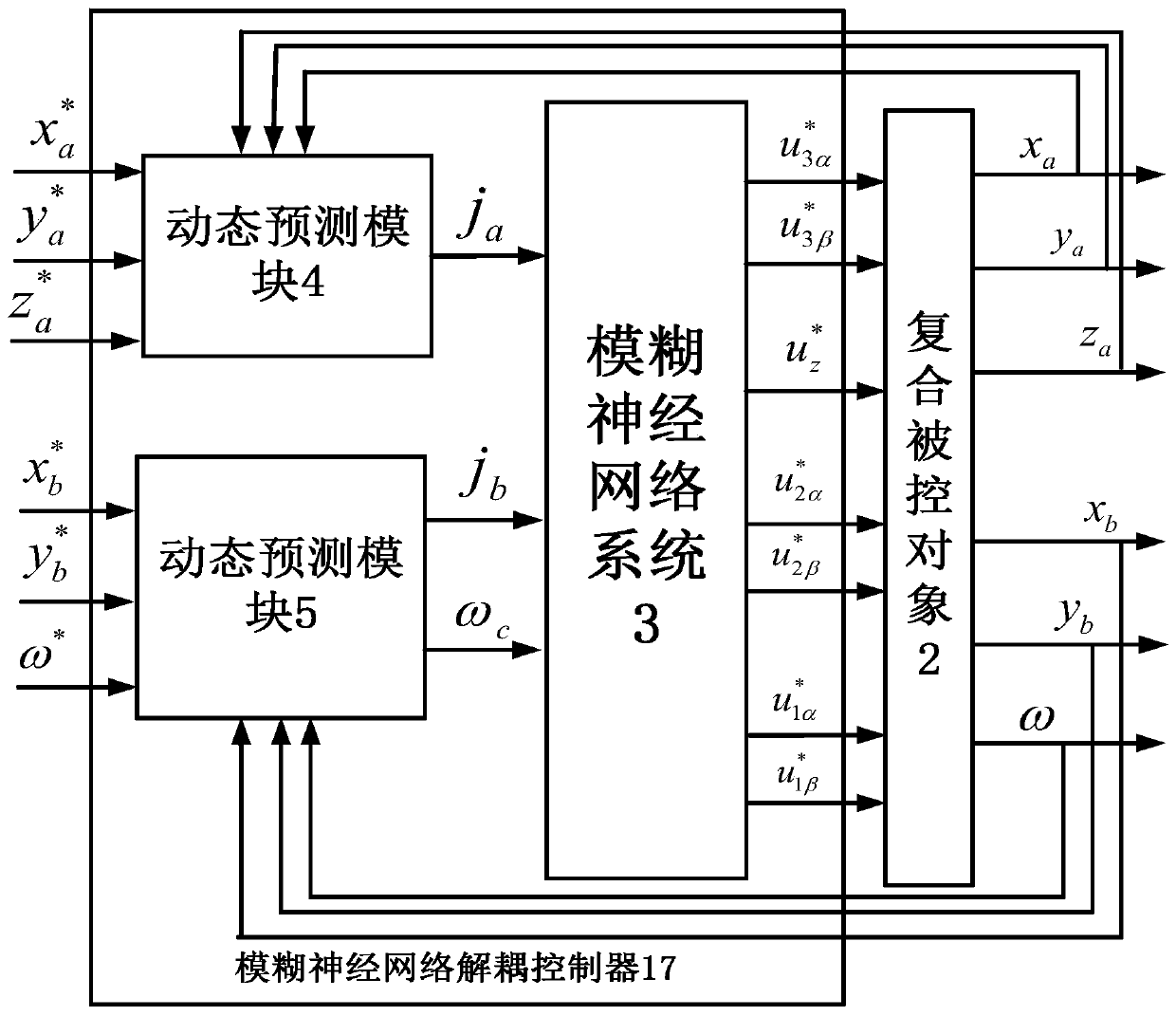
[0020] Such as figure 1 As shown, the fuzzy neural network decoupling controller 17 of the present invention is composed of two dynamic prediction modules 4, 5 and a fuzzy neural network system 3 connected in series, and the output ends of the two dynamic prediction modules 4, 5 are connected in series with the fuzzy neural network system The input end of 3 and the output end of the fuzzy neural network system 3 are connected to the compound controlled object 2 including the five-degree-of-freedom bearingless permanent magnet synchronous motor.
[0021] The output of compound controlled object 2 is the four radial displacements {x a ,y a ,x b ,y b}, an axial displacement z a and a rotational speed ω. The input of the first dynamic prediction module 4 is the radial displacement {x a ,y a}, axial displacement z a , Radial displacement given value and axial displacement given value The output of the first dynamic prediction module 4 is the composite control signal j ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More