Capsule type endoscope in-vitro navigation device
A navigation device and endoscope technology, applied in endoscopy, medical science, surgery, etc., can solve the problems of large blind spots, low positioning accuracy, difficult mechanical safety factor and structural stability in capsule endoscopy , to achieve the effect of simple and intuitive space position control, stable and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] A preferred embodiment of a capsule endoscope external navigation device related to the present invention is described in detail below with reference to the accompanying drawings, but the present invention is not limited to this embodiment. In order to provide the public with a thorough understanding of the present invention, specific details are described in the following preferred embodiments of the present invention.
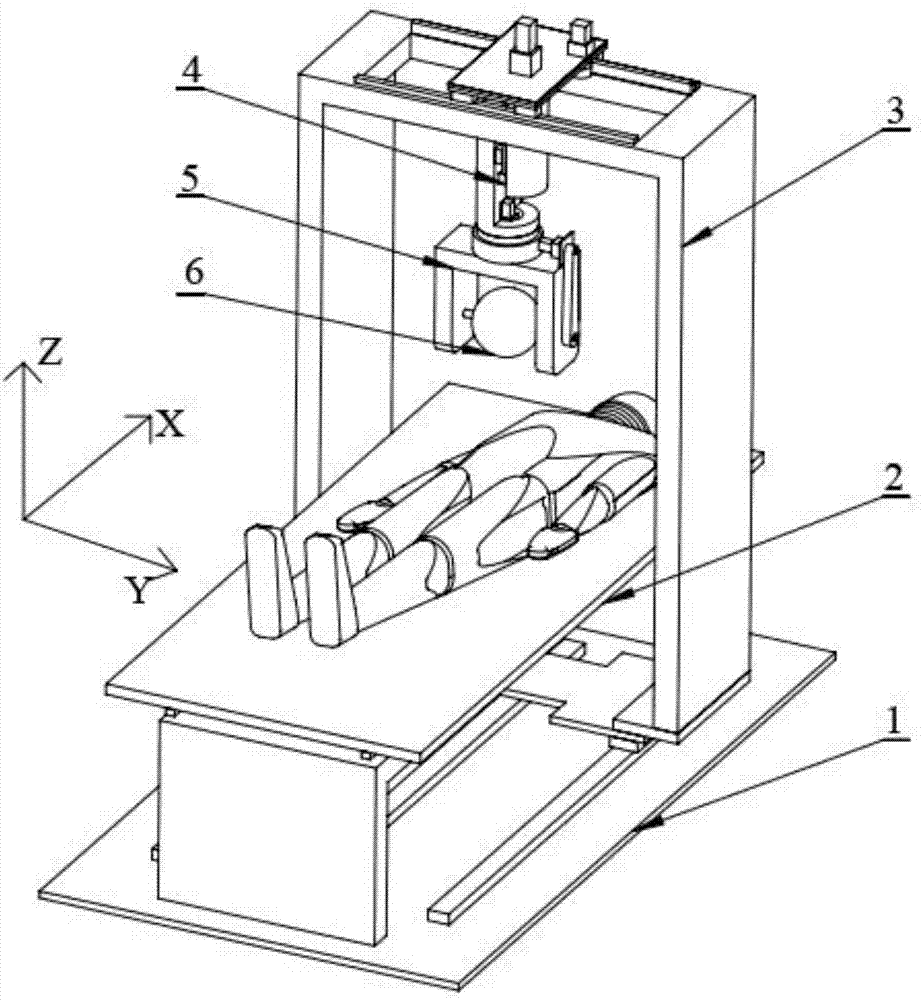
[0031] Such as figure 1 As shown, a capsule endoscope external navigation device includes a base mechanism 1, a movable bed body 2, a Y-axis frame mechanism 3, a Z-axis mechanism 4, a magnet universal rotation mechanism 5 and a magnet 6, and the movable bed body 2 Fixed on the base mechanism 1, the Y-axis frame mechanism 3 is vertically connected to the base mechanism 1, the Z-axis mechanism 4 is movably connected vertically to the Y-axis frame mechanism 3, the magnet 6 is connected to the magnet universal rotation mechanism 5, and the magnet universal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More