

Four-leg robot
A quadruped robot and fuselage technology, applied in the field of robotics, can solve the problems of increasing the degree of freedom of the waist, reducing the degree of freedom of the legs, and large quality, so as to increase the degree of freedom of the waist, reduce the degree of freedom of the legs, and reduce the weight of the body Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
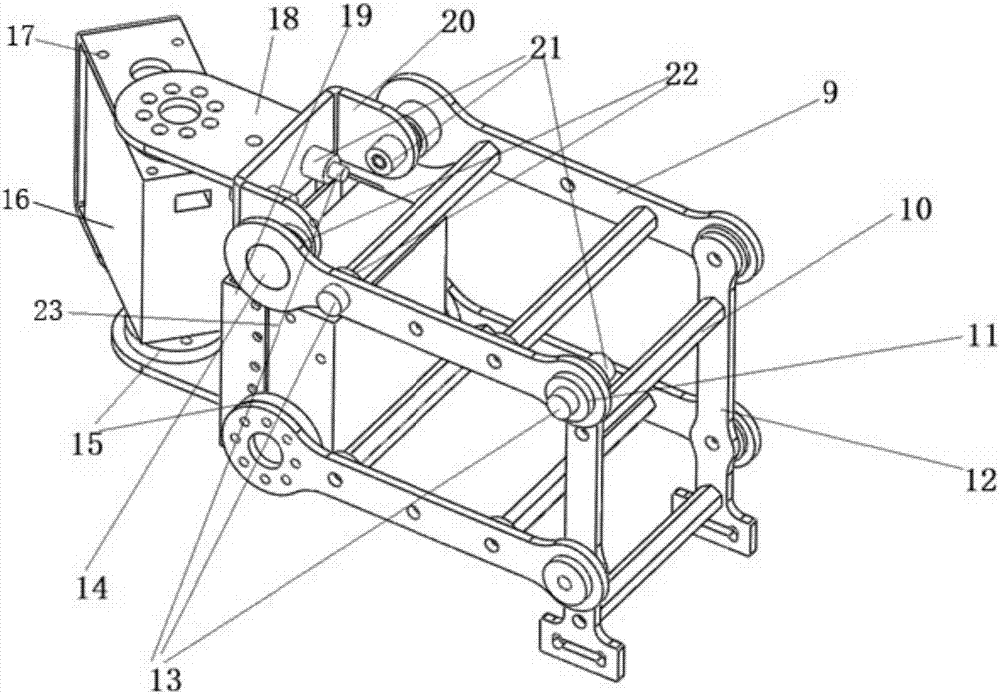
[0028] Such as figure 1 , 3 , a quadruped robot shown in 5, comprising a fuselage, connected to four leg mechanisms arranged on the fuselage,
[0029] The fuselage includes a movable hinged front waist and a rear waist, wherein the front waist and the rear waist are respectively symmetrically connected to two leg mechanisms;
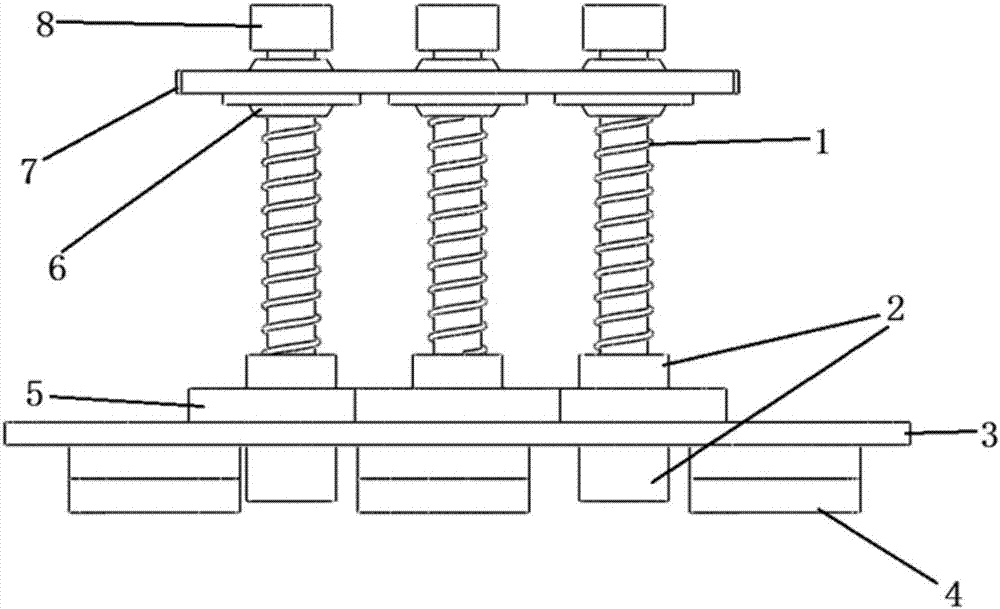
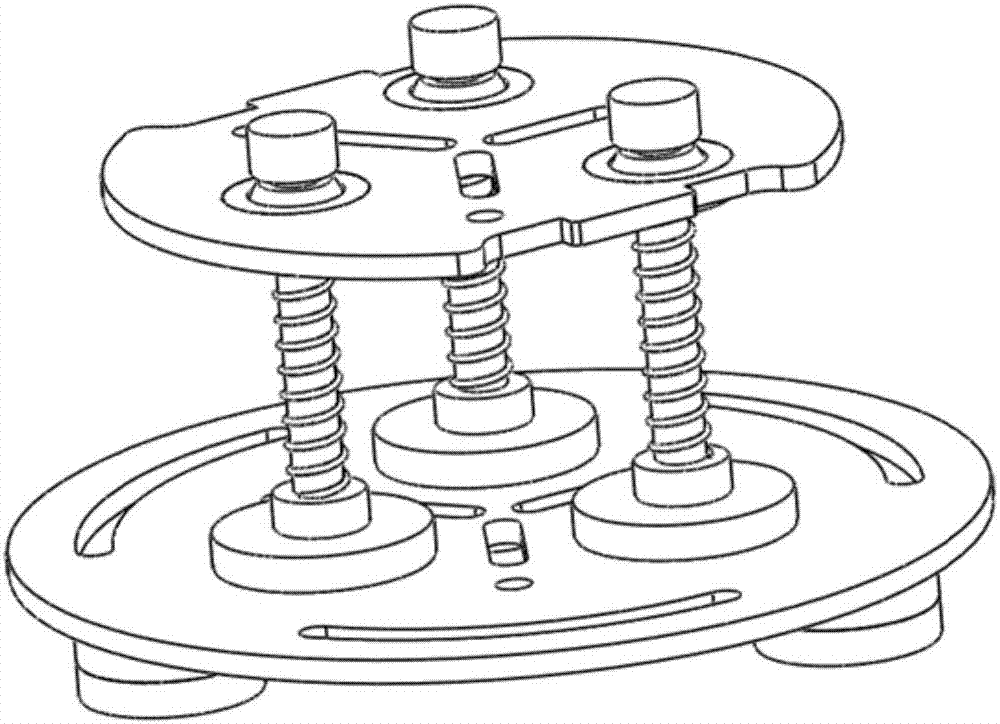
[0030] Specifically, the front waist and the back waist both include an upper waist board 32 and a lower waist board 28 arranged in parallel, and the upper waist board 32 and the lower waist board 28 are fixedly connected by a number of waist double-pass copper pillars 29 and a number of support plates 30, The double-pass copper pillars 29 at the waist are fixed between the upper and lower waist plates through two pairs of hexagon socket bolts 25 and bushings 31 at the waist; The flange bearing 24 is hinged.
[0031]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More