

Method for automatic and fine operation and obstacle avoidance of plant-protecting unmanned aerial vehicle based on BDS and INS
A plant protection UAV and UAV technology, applied in the field of UAV, can solve the problems of regional spraying leakage, lower operation quality, large error, etc., and achieve the effect of avoiding heavy spraying and missed spraying, and preventing collision with obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to deepen the understanding of the present invention, the present invention will be further described below in conjunction with the embodiments and accompanying drawings. The embodiments are only used to explain the present invention and do not constitute a limitation to the protection scope of the present invention.
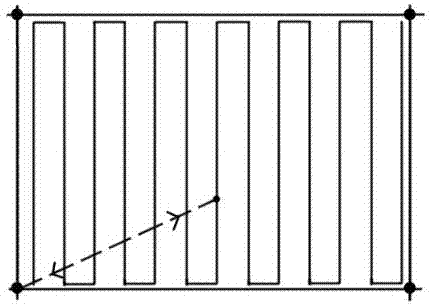
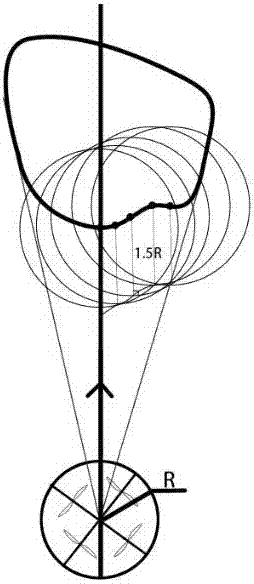
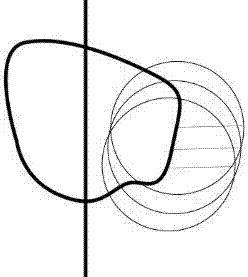
[0027] Such as Figure 1-5 As shown, the present invention provides a plant protection drone based on BDS and INS, including a drone, a flight controller, an airborne controller and a power unit, and the flight controller and the airborne controller are all installed on the unmanned aerial vehicle. The flight controller includes a BDS receiver, IMU (inertial measurement unit) and a power module. The BDS receiver, IMU and power module transmit information to the onboard controller in real time. The onboard controller receives BDS data and measures the spatial position of the UAV. Perform differential calculation with the base station on the ground...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More