

A gyro flywheel pair unbalance identification method
A technology of even unbalance and gyro flywheel, which is applied in the field of gyro flywheel even unbalance identification, can solve the problems of no-solution difference between different solutions, gyro flywheel even unbalance identification, etc., so as to improve torque output accuracy and attitude measurement accuracy, improve operation Stability, effect of improving mass distribution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
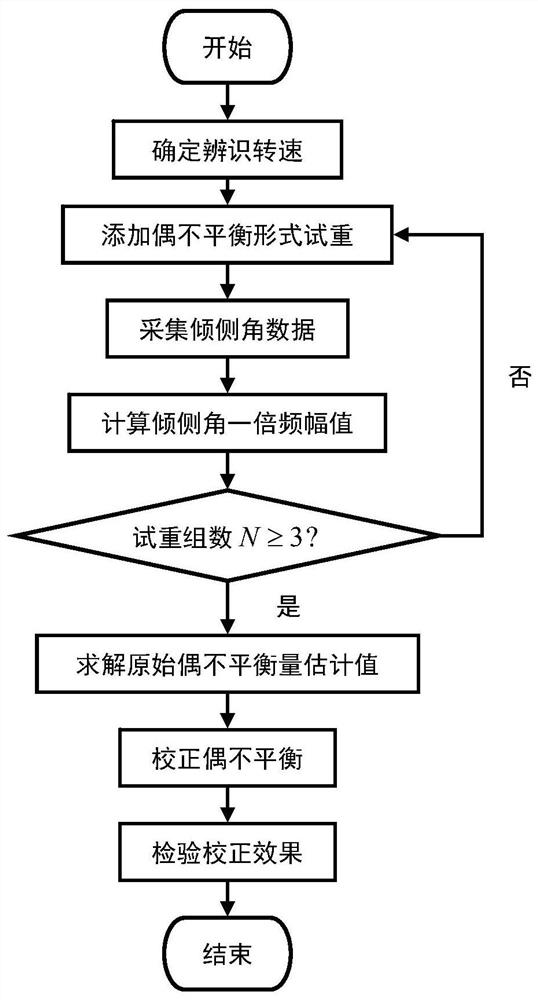
[0026] Specific implementation mode one: as figure 1 As shown, a gyro flywheel couple unbalance identification method includes the following steps:
[0027] Preliminary preparatory work to determine the specific process of the identification speed of the couple unbalance is as follows:
[0028] 1) Within the range of the working speed of the gyro flywheel, select the test speed as ω i , i=1,2,...,n;
[0029] 2) When the test speed ω i After the operation is stable, make the gyro flywheel work in the open-loop state of the tilt control loop, record the data of the tilt angle of the gyro flywheel rotor within 10 seconds, and repeat this step 5 times;
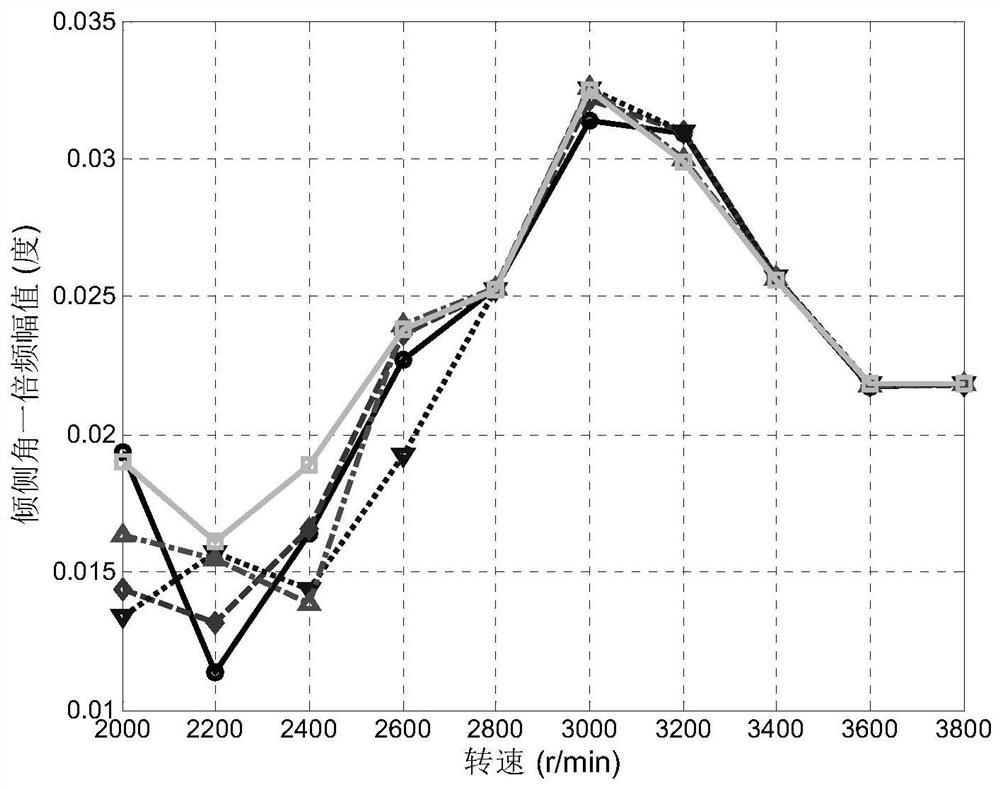
[0030] 3) Using fast Fourier transform, calculate the inclination angle data collected in step 2), and obtain the 5 times of test speed ω i The corresponding one-octave amplitude of the roll angle is φ ij ,j=1,2,…,5, such as figure 2 shown.
[0031] 4) According to the amplitude φ of one octave frequency of the 5th roll a...
specific Embodiment approach 2
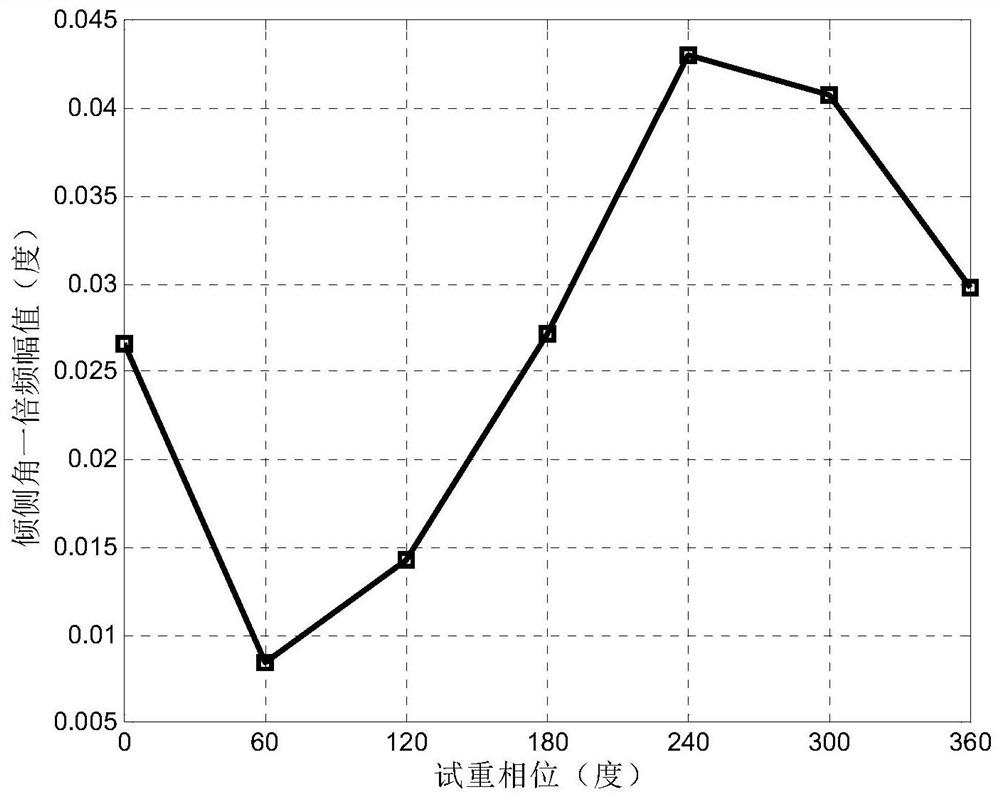
[0037] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that in the step 1, a test weight in the form of even unbalance is added to the N phases of the rotor. Under the identification speed, the rotor tilt angle data is collected, and according to the tilt angle data Obtain the one-octave frequency amplitude of the inclination angle corresponding to the N phase addition trial weights as φ k The specific process is:
[0038] Step 11. Without adding any test weight, make the rotor of the gyro flywheel identify the speed ω T Stable operation, under the open-loop condition of the tilt control loop, record the gyro flywheel rotor tilt angle data within 10 seconds, use the fast Fourier transform to calculate the rotor tilt angle, and obtain the initial tilt angle double frequency amplitude as φ 0 ;
[0039] Step 1 and 2, in the gyro flywheel rotor phase θ k k=1,2,...,N,N≥3, N is the number of places to add test weight, and the added mass ...
specific Embodiment approach 3
[0043] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: in said step two, the N phase addition test weights obtained by step one are used to add the corresponding one-fold frequency amplitude of the roll angle to φ k , using the least squares estimation algorithm based on the amplitude influence coefficient method or the least squares estimation algorithm based on the amplitude and phase influence coefficient method, the specific process of identifying the original couple unbalance of the gyro flywheel rotor is as follows:
[0044] Step 21: Assume that the phase and amplitude of the original couple imbalance of the gyro flywheel are θ 0 and U 0 , the equivalent mass of the original couple unbalance on the test weight surface (the plane where the test weight is added) is m 0 . Based on the influence coefficient method, the complex number form is used to express the relationship between the inclination angle and the couple ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More