

Servo mechanism based active force/touch sense feedback system and work method thereof
A technology of tactile feedback and servo mechanism, which is applied in the input/output of user/computer interaction, the input/output process of data processing, computer components, etc., and can solve the problem of large size, poor flexibility and limited application scenarios of mechanical systems and other issues, to achieve the effect of strong system flexibility, large-scale force/tactile interaction, and small size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
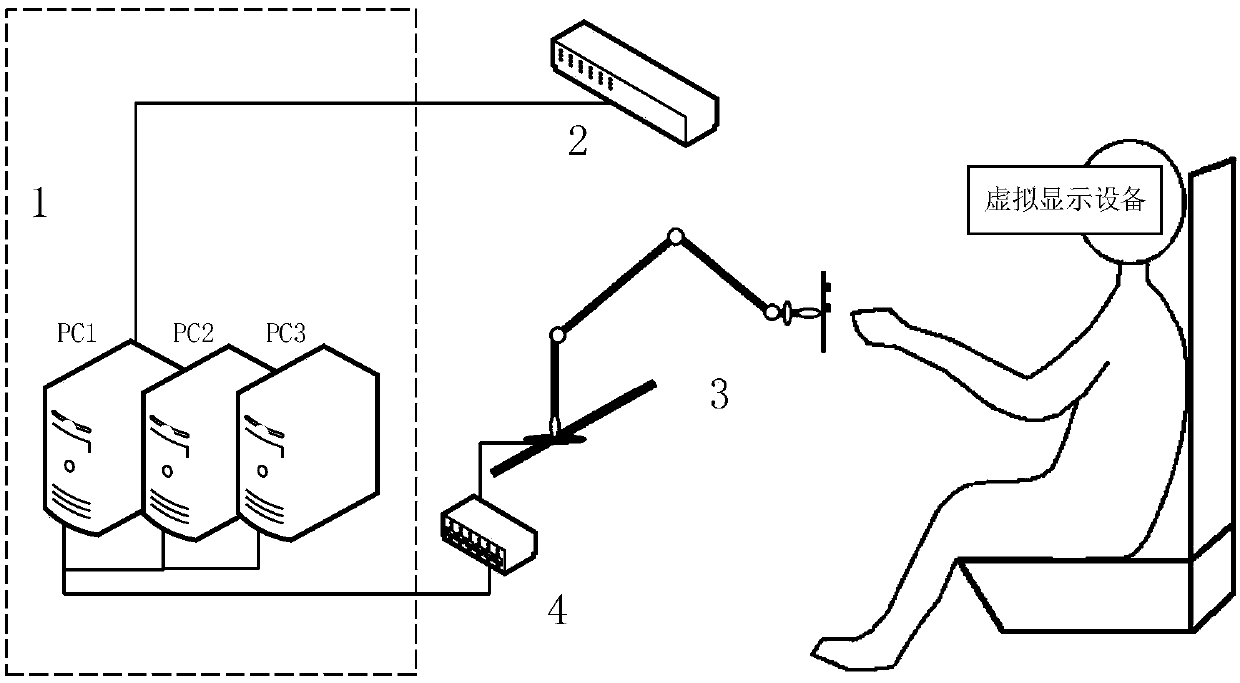
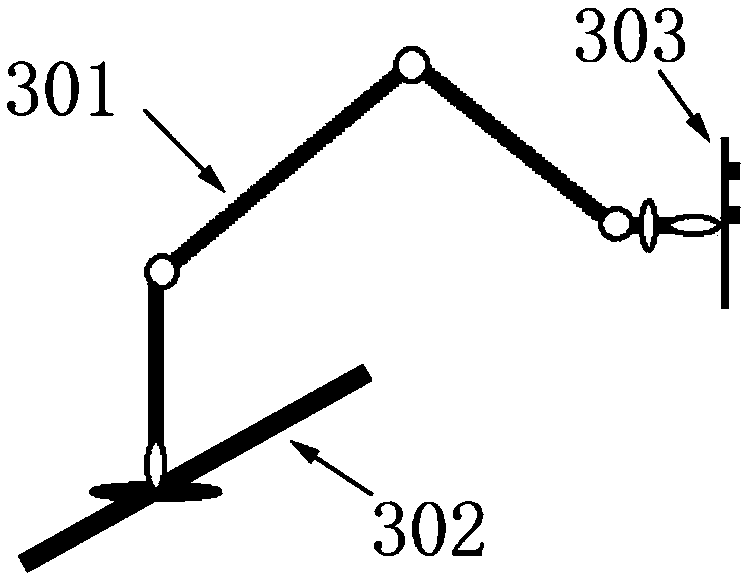
[0022] Such as figure 1 , 2 As shown, an active force / tactile feedback system based on a servo mechanism is composed of a computer 1 , a motion tracking sensor 2 , a force / tactile feedback mechanism 3 and its controller 4 .
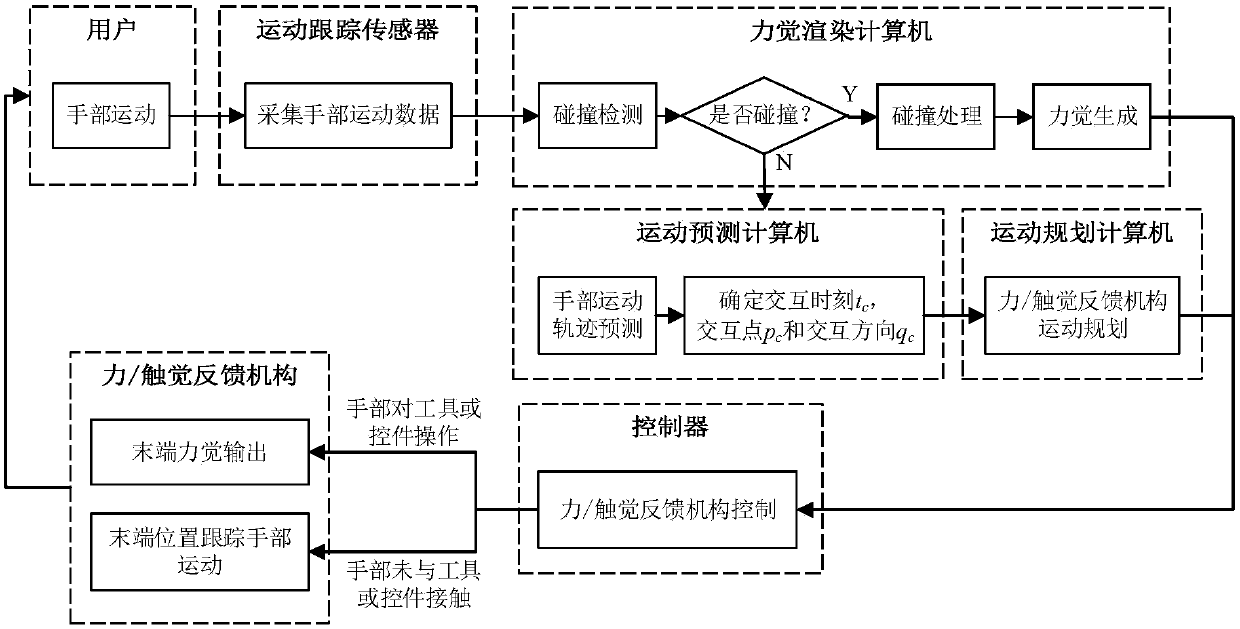
[0023] The computer 1 includes a force rendering computer PC1, a motion prediction computer PC2 and a motion planning computer PC3. Among them, the force sense rendering computer PC1 is used for hand posture calculation, collision detection and real-time collision response and force sense generation when the hand is operated, and the motion prediction computer PC2 is used for hand trajectory prediction before the hand contacts tools or controls , the motion planning computer PC3 is used for the motion planning of the force / tactile feedback mechanism before the hand comes into contact with the tool or control. PC1, PC2 and PC3 are connected by network cables and communicate through Ethernet protocol for data exchange and calculation synchronization.
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More