

Tunnel seepage detection robot based on multi-sensor fusion
A technology of multi-sensor fusion and robotics, applied in the testing of fluid tightness, testing of machine/structural components, and detecting the appearance of fluid at leakage points, etc., can solve the secondary damage of tunnels, increase the burden on workers, and make detection impossible problems, to achieve the effect of liberating labor, high degree of automation, and ensuring detection accuracy and detection efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
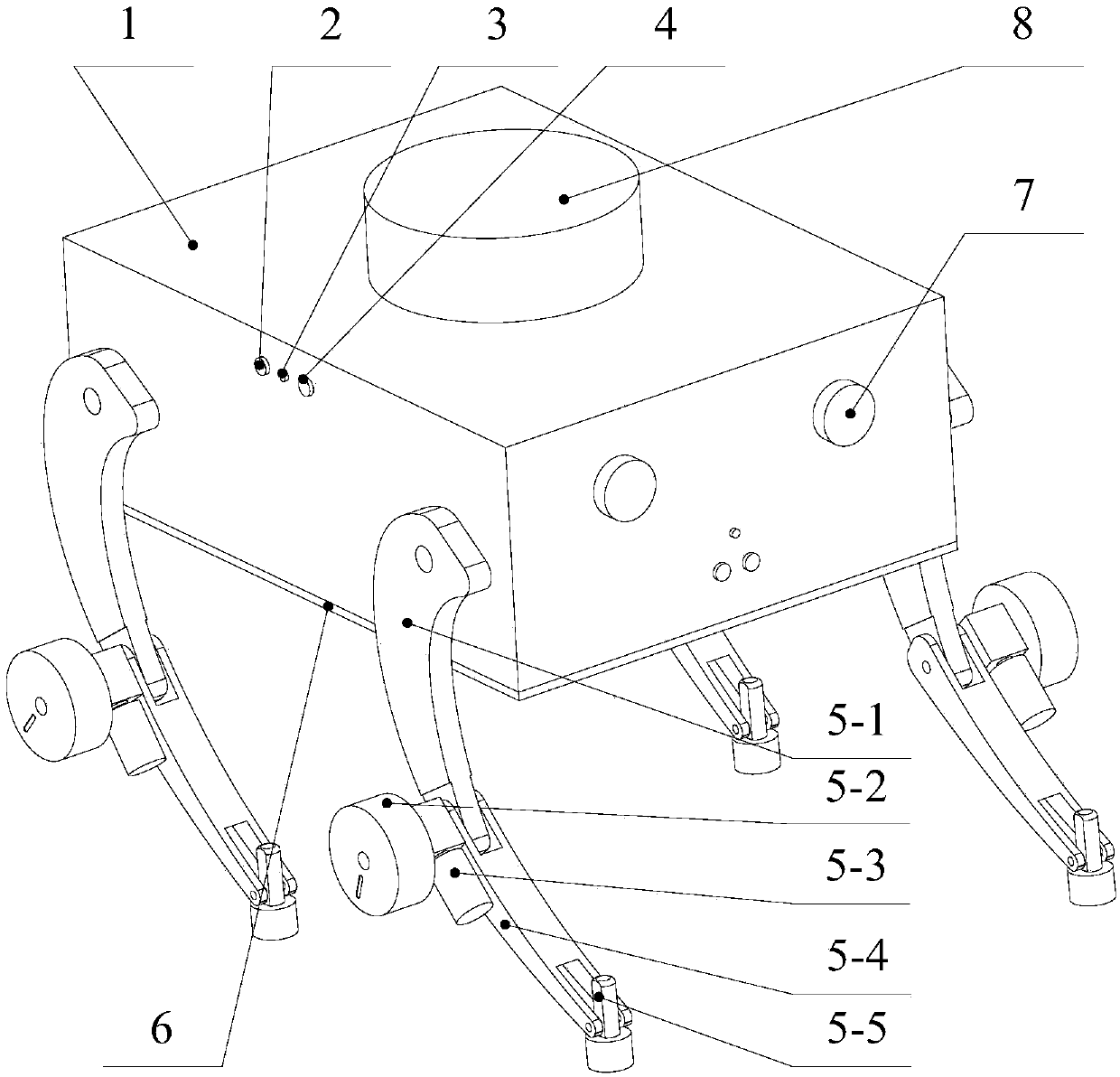
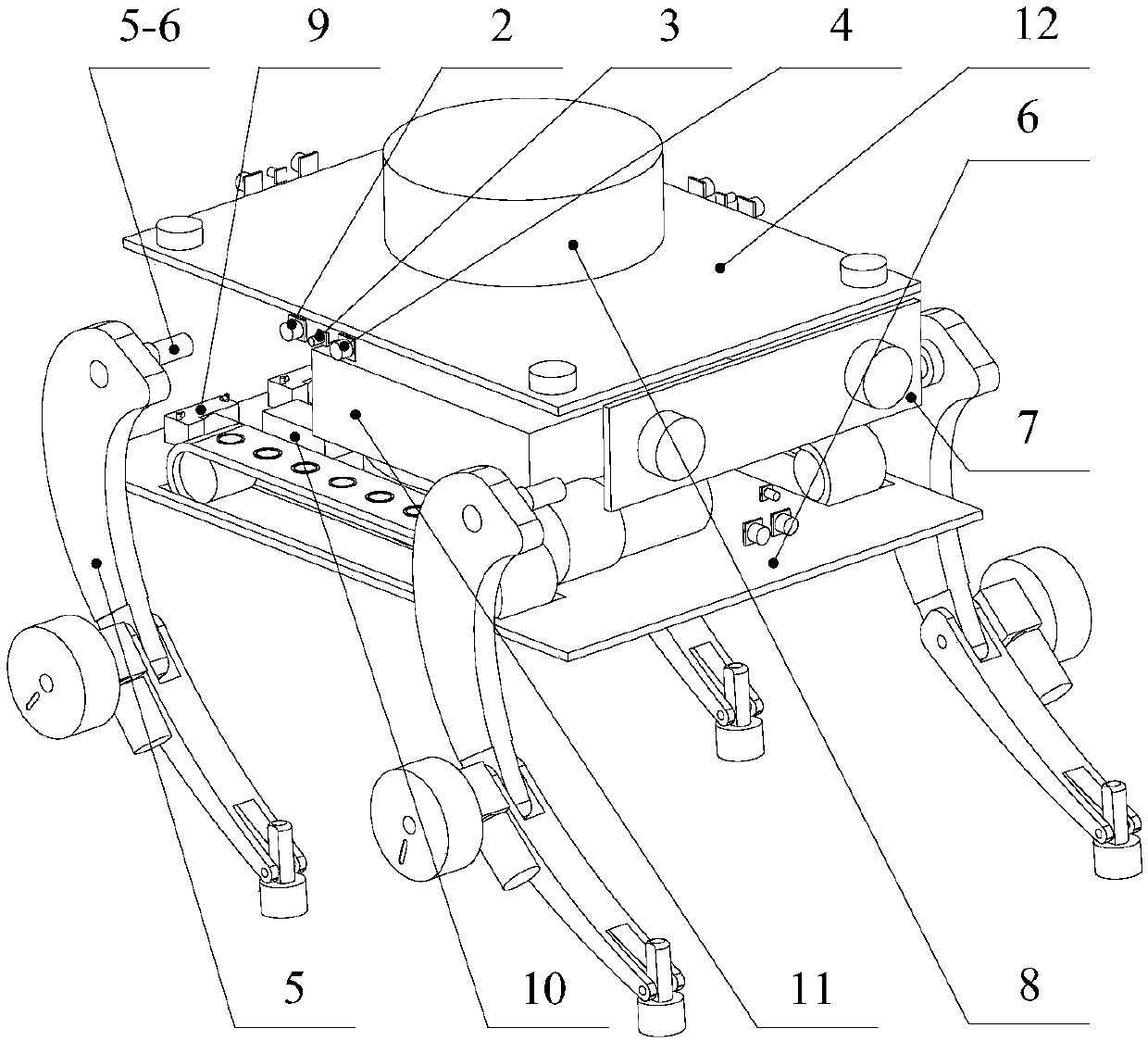
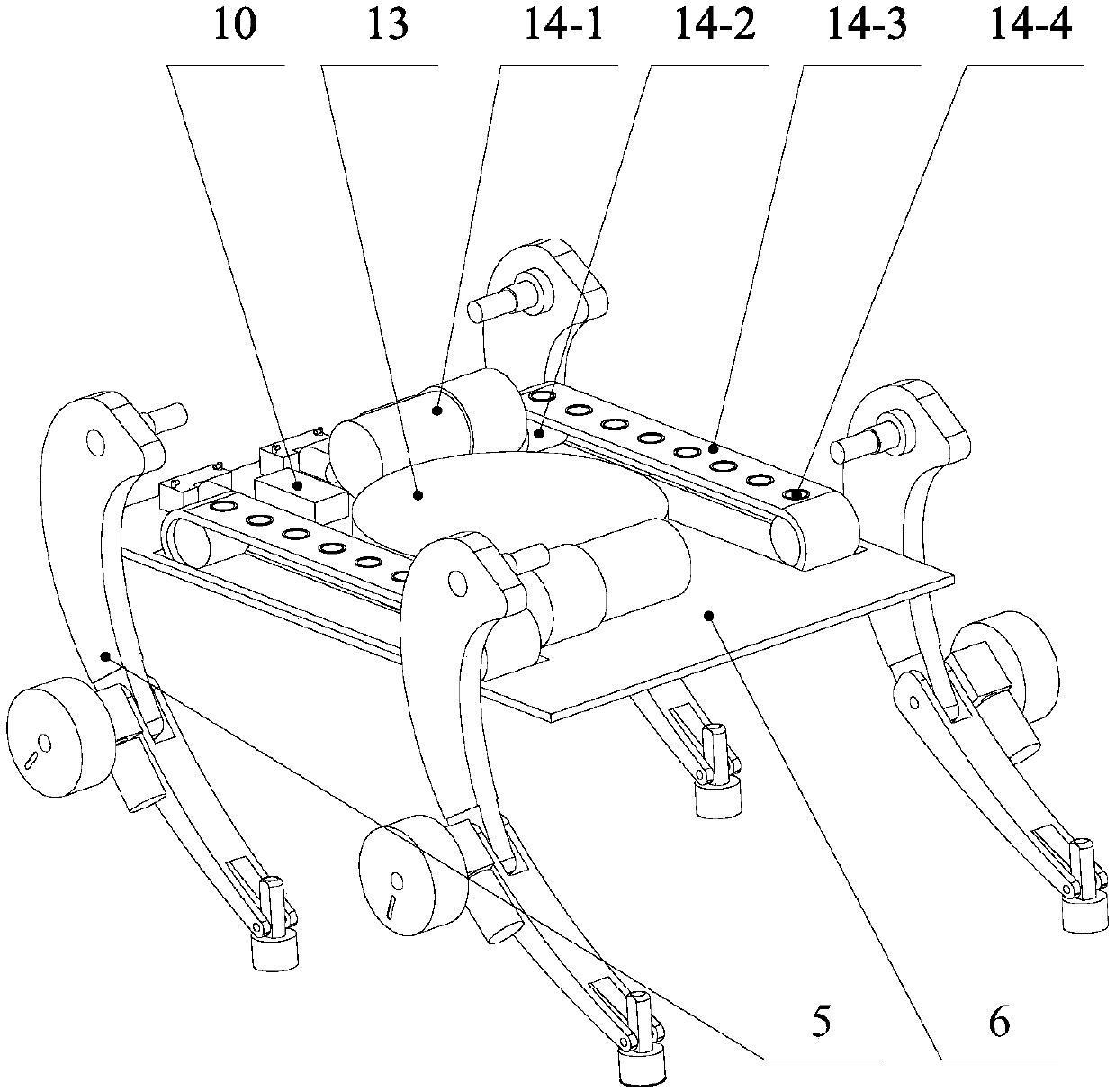
[0032]In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
[0033] see figure 1 , figure 2 , image 3 and Figure 4 , the tunnel water seepage detection robot based on multi-sensor fusion provided by the preferred embodiment of the present invention, the tunnel water seepage detection robot can carry out 24-hour uninterrupted automatic detection without affecting the train operation, and can reduce the labor of the staff at the same time Intensive an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More