

Long-endurance unmanned-aircraft oil-electric hybrid power system and control method
A hybrid power system and long-endurance technology, which is applied to aircraft power plants, motor vehicles, unmanned aircraft, etc., can solve the problems of high-power engines with heavy weight, low thermal efficiency, and heavy system weight, and achieve energy saving. consumption effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be described in further detail below in conjunction with the accompanying drawings.
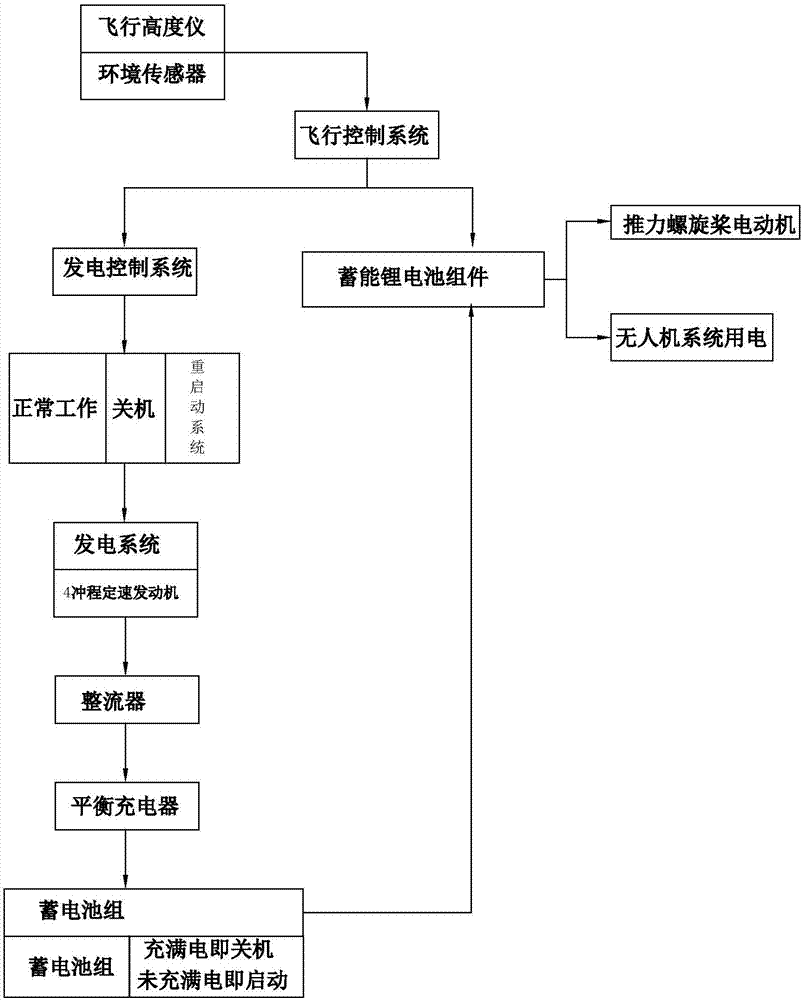
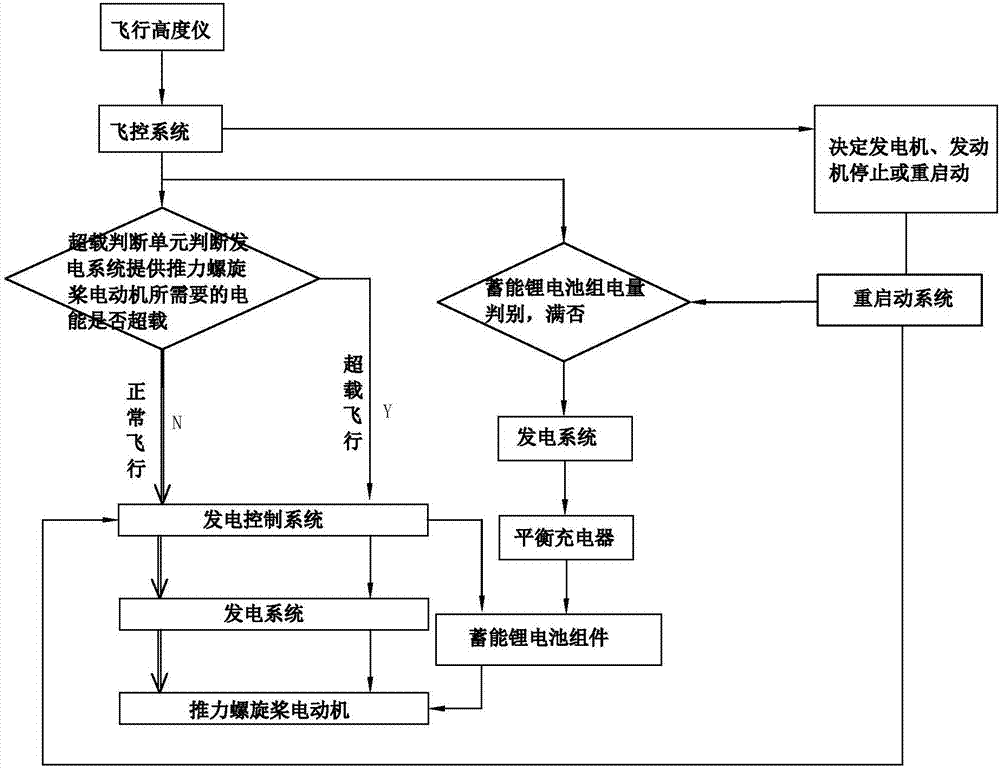
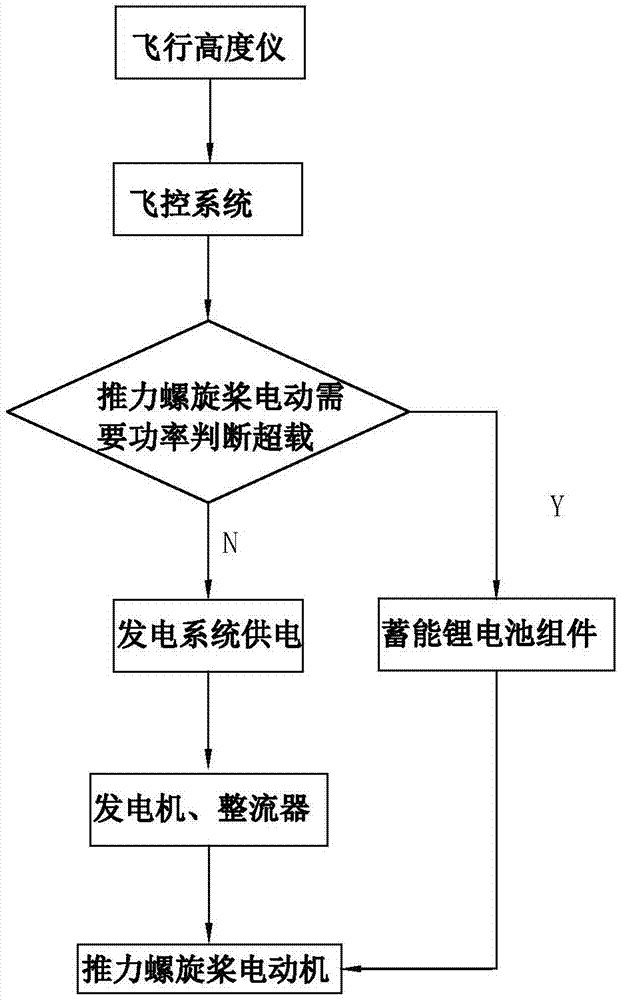
[0057] A kind of long-endurance UAV oil-electric hybrid power system of the present invention is based on the following design principles:
[0058] 1. The long-endurance flight system must first solve the contradiction caused by the long-endurance flight that the aircraft is too heavy to take off. For example, a pure fuel flight power system or a pure battery flight power system must achieve a long flight time of 20 hours, and its overweight load makes the aircraft unable to take off.
[0059] 2. The long-endurance flight system also needs to solve the problem that the efficiency of the oil-electric hybrid system in the existing technology is lower than that of the pure oil power system. The principle is as follows: the efficiency from the engine to the generator is 0.9, and the efficiency of the generator is 0.8. To the rectifier, the efficiency is 0.95, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More