

Hoisting system of permanent magnetic direct drive type electromagnetic suspended beam crane and control method of hoisting system
An electromagnetic hanging beam, permanent magnet direct drive technology, applied in the direction of load hanging components, transportation and packaging, can solve the problems of brake wear, inconsistent instantaneous speed, inconsistent load, etc., to prevent hook slip and overshoot, and smooth transition. The effect of running, smooth and precise control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
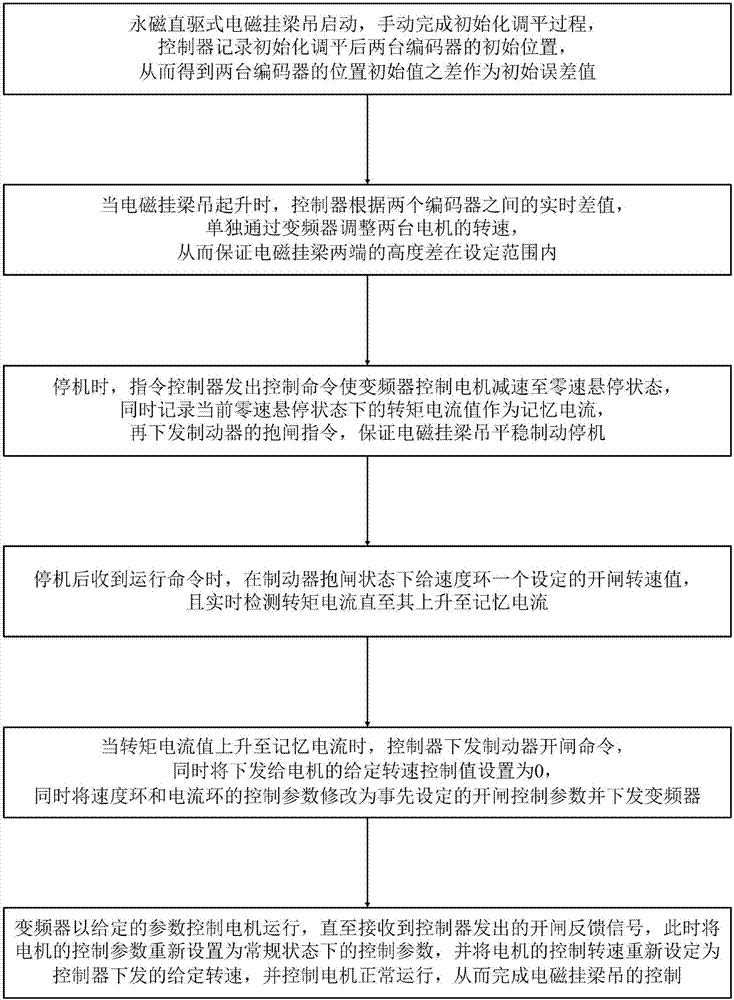
Method used
Image

Examples
Embodiment Construction
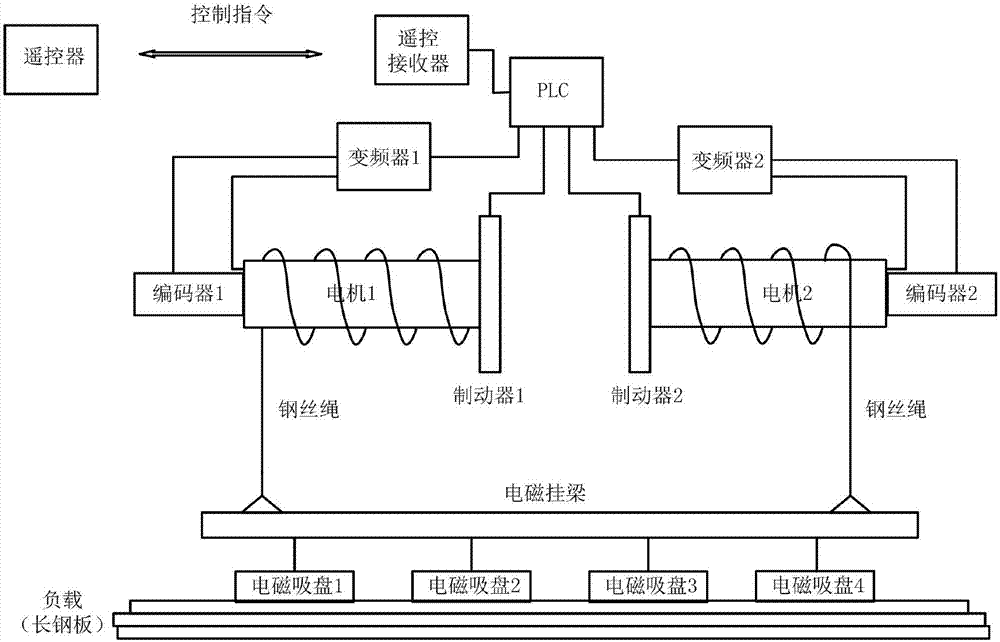
[0033] Such as figure 1 Shown is the functional block diagram of the lifting system of the present invention: the lifting system of the permanent magnet direct drive electromagnetic hanging beam crane provided by the present invention includes a controller, two frequency converters, two direct drive permanent magnet Synchronous motor and its wire rope, two brakes, electromagnetic hanging beam, several electromagnetic suckers, two encoders, remote receiver and remote controller; the controller controls two direct-drive permanent magnet synchronous motors through two frequency converters, and then through Wire ropes, electromagnetic hanging beams and electromagnetic suckers lift or lower heavy objects, and the controller is also connected to the brake to brake the motor by controlling the start and stop of the brake. It also includes: the encoder is connected to the direct drive permanent magnet synchronous motor, It is used to obtain the motor speed and position information of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More