

Robot positioning device and method based on novel visual guidance
A robot positioning and visual guidance technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems that binocular vision corresponding points are difficult to match, cannot realize three-dimensional vision guidance, and is not widely applicable. The calibration method is simple and easy line, meet the calibration requirements of industrial sites, and improve the effect of positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
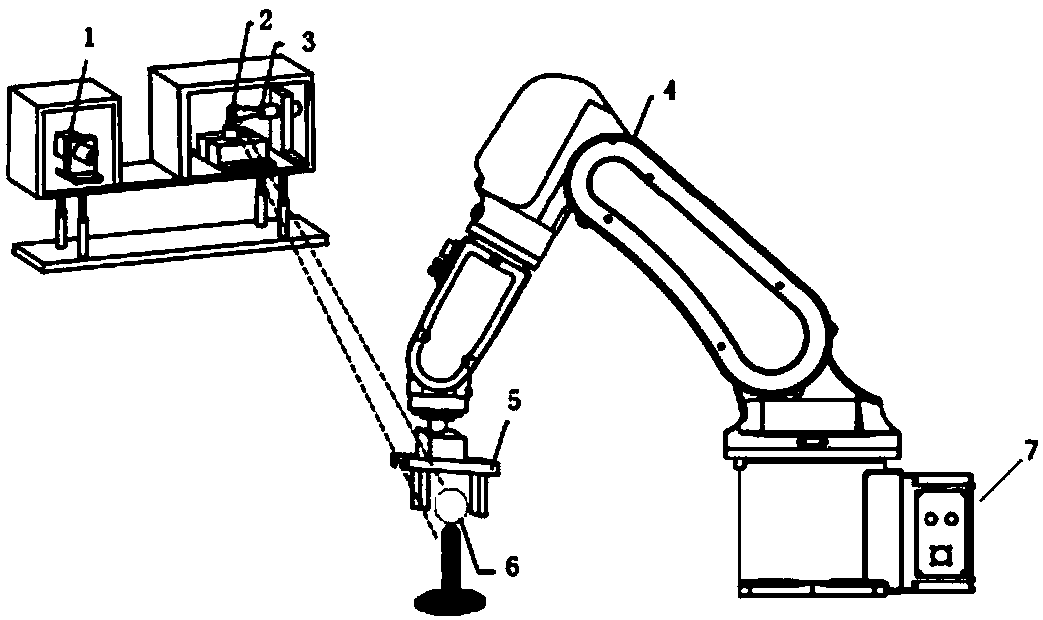
[0033] A robot positioning device based on a novel visual guidance of the present invention is composed of a line structured light self-scanning device, a robot module and a host computer, wherein:
[0034] see figure 1 , the line-structured light self-scanning device includes an industrial camera 1, a vibrating mirror 2, and a laser 3; wherein, the industrial camera 1 captures a plurality of two-dimensional checkerboard target images in different poses within its working range; The galvanometer 2 precisely controls the rotation angle through the voltage signal sent by the host computer 7; the line-structured light plane emitted by the laser 3 is reflected by the galvanometer 2 and projected onto the surface of the target object 6 to form a laser light bar, wherein the c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More