

Air-controlled gliding type underwater robot
An underwater robot and robot technology, which is applied to underwater operation equipment, non-mechanical gear transmission devices, ships, etc., can solve the problems of high price, seldom use, complex product structure, etc., and achieves good mobility, easy control, simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described below in conjunction with drawings and embodiments.
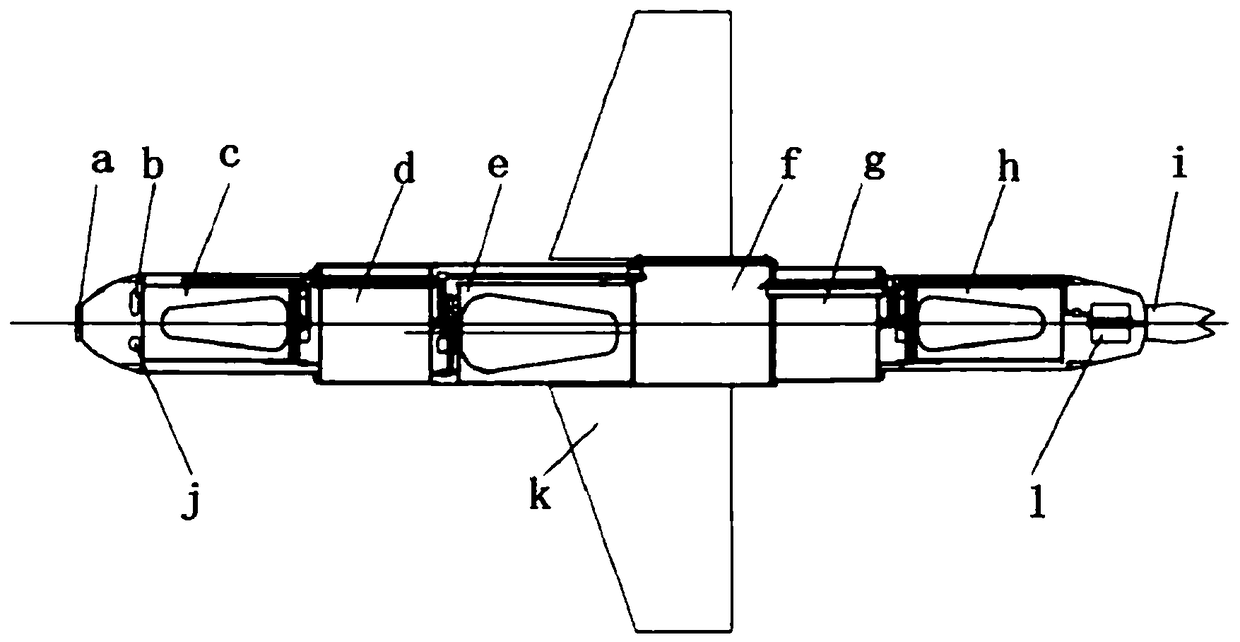
[0015] Such as figure 1 , because the underwater robot moves underwater, its movement resistance includes friction resistance and viscous pressure difference resistance. Since friction resistance is a function of Reynolds number and is related to the wet surface area, viscous pressure difference resistance is related to the shape of the body, so The design of the underwater robot's shape is extremely important for reducing frictional resistance and viscous pressure difference resistance.
[0016] The air-controlled gliding underwater robot designed in this study uses the principle of bionics to imitate the spindle-shaped fish body of fish, and process the underwater robot into a rotating body to reduce the resistance during its operation, thereby reducing power consumption. The main components of the robot include front and rear attitude cabins, elastic skin bags, high...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More