

Anti-explosion patrol robot
A technology of inspection robots and explosion-proof enclosures, applied in the field of intelligent robots, can solve problems such as low efficiency and high labor intensity of manual inspections, and achieve the effect of high precision and improved inspection efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
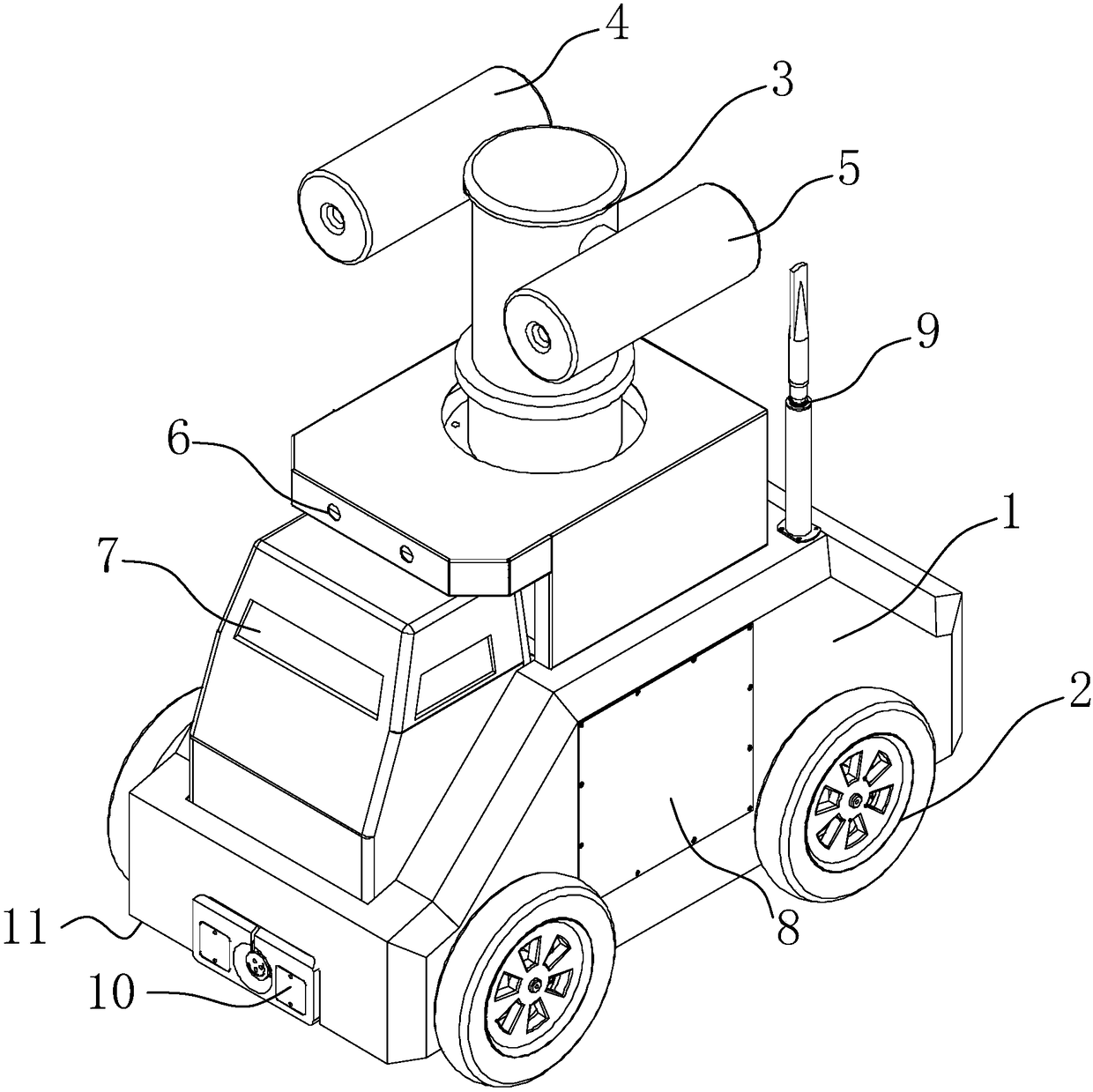
[0038] see figure 1 , the present embodiment comprises an explosion-proof casing 1, a wheel 2 installed at the bottom of the explosion-proof casing 1, and a pan-tilt 3 installed on the top of the explosion-proof casing 1. The pan-tilt 3 is provided with a high-definition camera 4 and an infrared thermal imager 5. The direction can be adjusted freely, thereby controlling the video acquisition orientation of the high-definition camera 4 and the thermal imaging camera 5 .
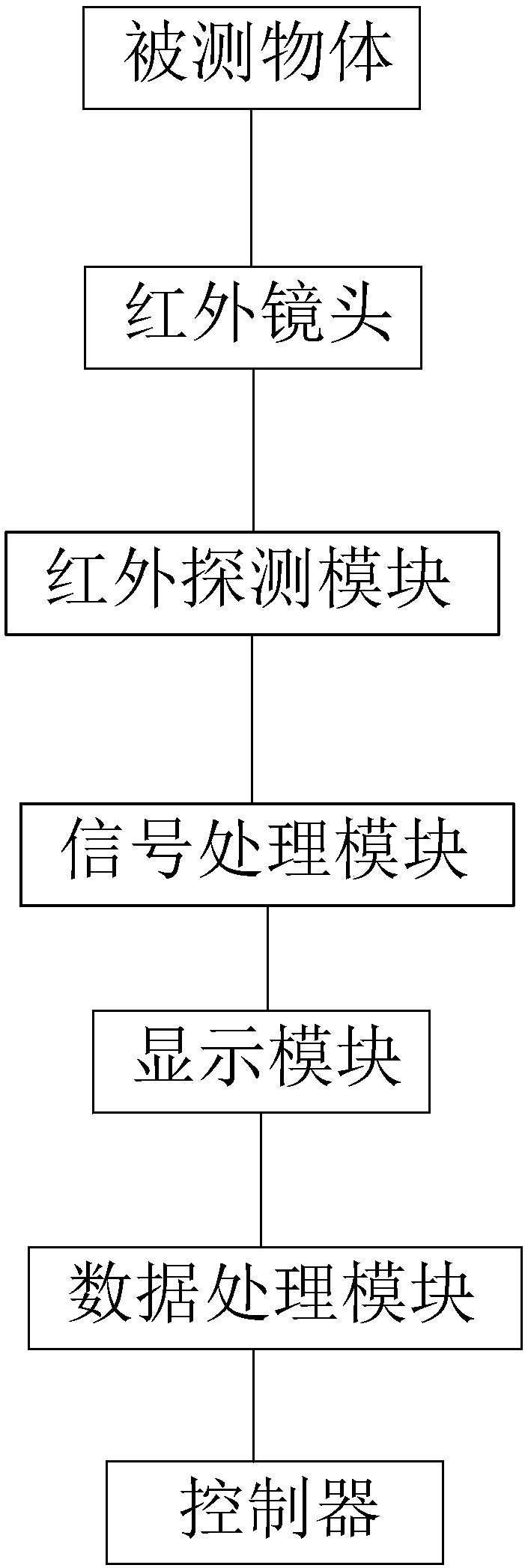
[0039] The high-definition camera 4 is used to collect video information around the inspection robot, which can accurately identify the readings of various instruments in the power station and judge whether they are normal.
[0040] The infrared thermal imaging camera 5 is used to collect temperature information around the inspection robot, and through infrared thermal imaging, it can be judged whether there is a phenomenon of heating caused by equipment current and voltage, so as to detect equipment defects i...
Embodiment 2
[0052] The difference between this embodiment and Embodiment 1 is that the explosion-proof housing 1 is provided with an ultrasonic obstacle avoidance device 6, which collects the distance and direction of obstacles through ultrasonic waves, and makes a judgment to avoid obstacles.
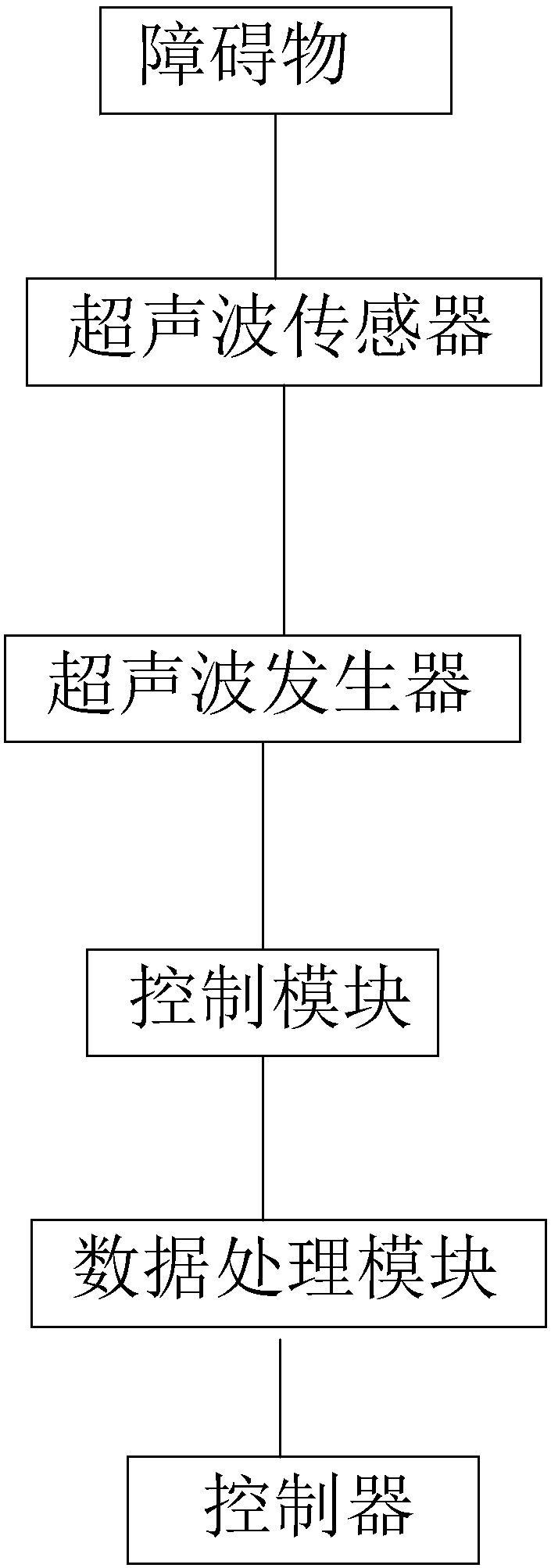
[0053] Such as image 3 As shown, the ultrasonic obstacle avoidance device 6 includes an ultrasonic generator, an ultrasonic sensor, a control module, and a data processing module.
[0054] The ultrasonic generator is an ultrasonic frequency electronic oscillator. When the ultrasonic frequency voltage generated by the oscillator is applied to the ultrasonic sensor, the ultrasonic sensor converts the energy of ultrasonic electromagnetic oscillation into sound waves.
[0055] The control module excites the ultrasonic generator and the ultrasonic sensor to generate ultrasonic waves by sending a pulse signal of a certain frequency, and the ultrasonic waves reach the surface of the obstacle to form ref...
Embodiment 3
[0057] The difference between this embodiment and Embodiment 2 is that a laser radar device 7 is also provided on the explosion-proof enclosure 1 for autonomous positioning and navigation.
[0058] The laser radar device 7 is equipped with a magnetic navigation module.
[0059] The working principle of laser radar is very similar to that of radar. With laser as the signal source, the pulsed laser emitted by the laser hits the target object, causing scattering, and part of the light waves will be reflected to the receiver of the laser radar. According to the principle of laser ranging By calculation, the distance from the lidar to the target point can be obtained. The pulsed laser continuously scans the target object to obtain the data of all target points on the target object. After imaging processing with this data, an accurate three-dimensional image can be obtained.
[0060] The magnetic navigation module judges the shape of the path such as straight roads, curves, intersec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More