

Agricultural processing robot system and control method thereof
A robot system and robot motion technology, applied in the field of mechanical processing, can solve the problems of low precision and low stability of parts processing and production
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in more detail and complete below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention.
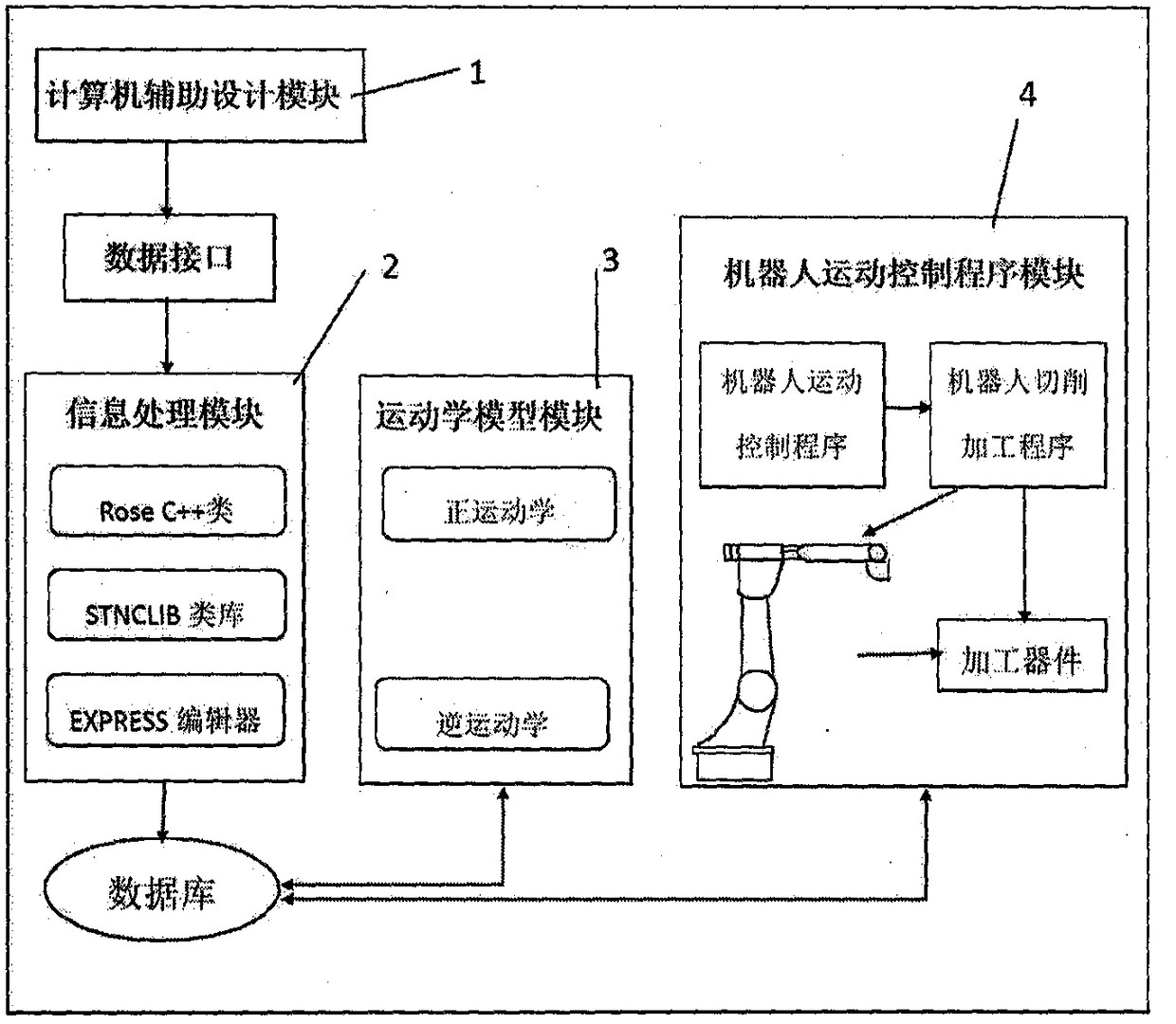
[0022] see figure 1 , An agricultural cutting robot system of the present invention includes a computer-aided design module 1, an information processing module 2, a motion model module 3, and a robot motion control program module 4. in:
[0023] The computer-aided design module 1 is responsible for designing the CAD size requirements of parts and components, and generates coordinate files according to the process requirements; the information processing module 2 includes Rose C++ class, STNCLIB class library, and EXPRESS editor for completing the production and processing program The acquisition of specific control information; the motion model module 3 includes forwar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More