

System modeling method for small rotor unmanned aerial vehicle on basis of closed loop subspace identification
A closed-loop subspace, unmanned rotor technology, used in general control systems, control/regulation systems, instruments, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
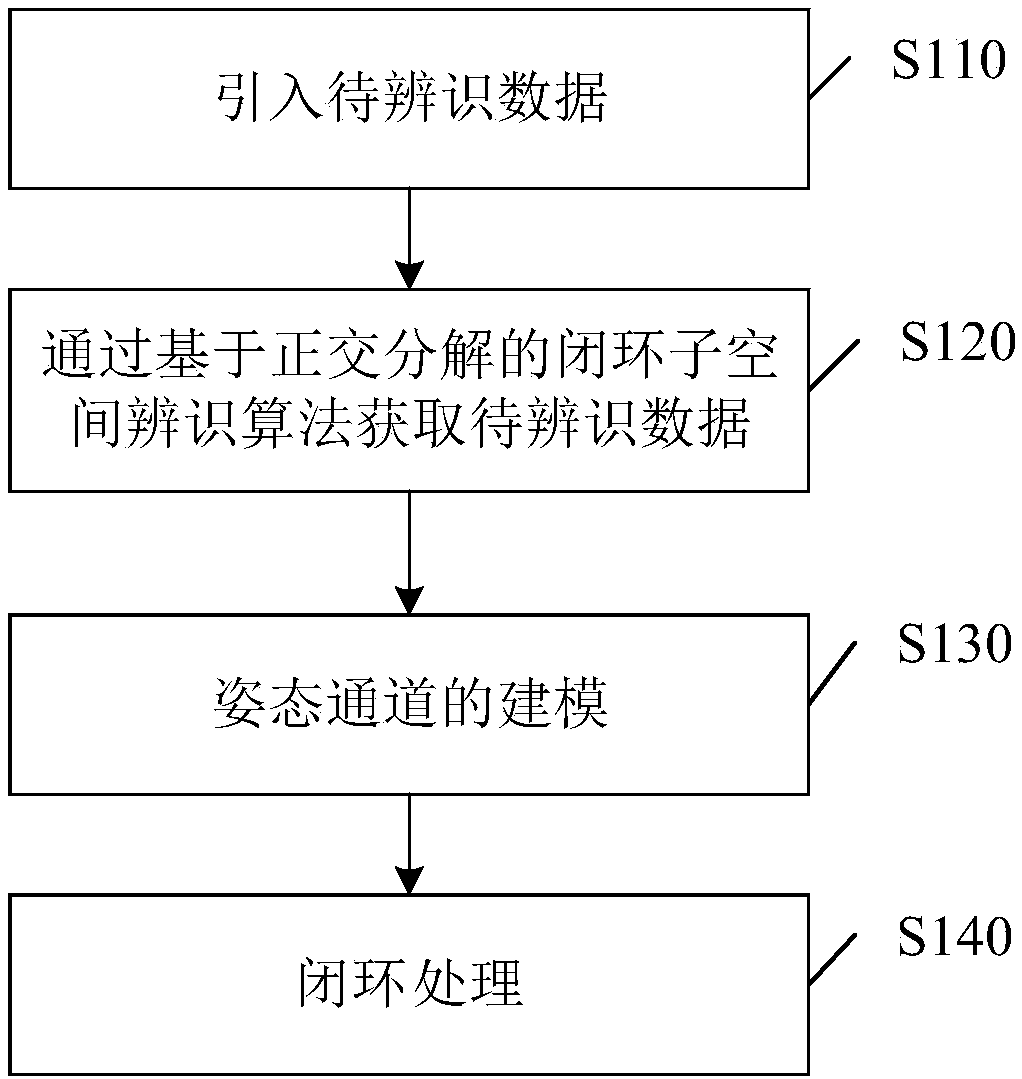
[0101] Such as figure 1 As shown, an embodiment of the present invention is provided based on a closed-loop subspace identification-based small rotor UAV system modeling method, based on the subspace identification algorithm and the characteristics of the small rotor UAV closed-loop control system, using orthogonal decomposition The transfer function of the closed-loop control system of the small-rotor unmanned aerial vehicle is decomposed into a deterministic part and a random part, and then by decoupling the correlation between the input signal and the noise of the closed-loop control system of the small-rotor unmanned aerial vehicle, an accurate identification of the small-rotor unmanned aerial vehicle is obtained. Aircraft closed-loop control system model, the steps are as follows S110-S140:
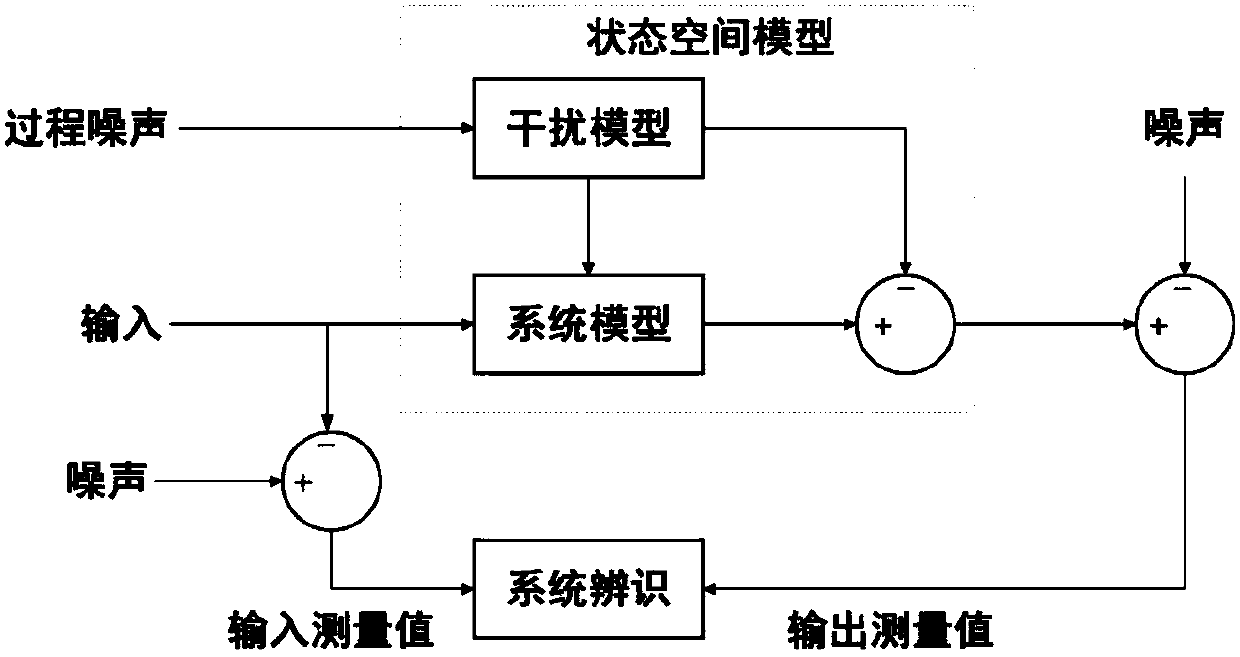
[0102] Such as figure 2 As shown, it is a structural block diagram of the system identification algorithm in the embodiment of the present invention. Due to various consideration...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More