

A Multi-objective Optimization Method for Wheel Torque of Electric Wheel Drive Vehicles Based on the Optimal Vehicle Comprehensive Performance
A technology of multi-objective optimization and comprehensive performance, applied in the field of wheel torque distribution of electric wheel drive vehicles, can solve the problem of studying stability or economy alone, restricting the development of high-performance electric wheel drive vehicles, and rarely taking into account the electric wheel Drive vehicle stability and economy to achieve the effect of ensuring vehicle stability, improving solution speed, and improving the ability of different driving conditions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be further described in detail below in conjunction with the accompanying drawings, so that those skilled in the art can implement it with reference to the description.
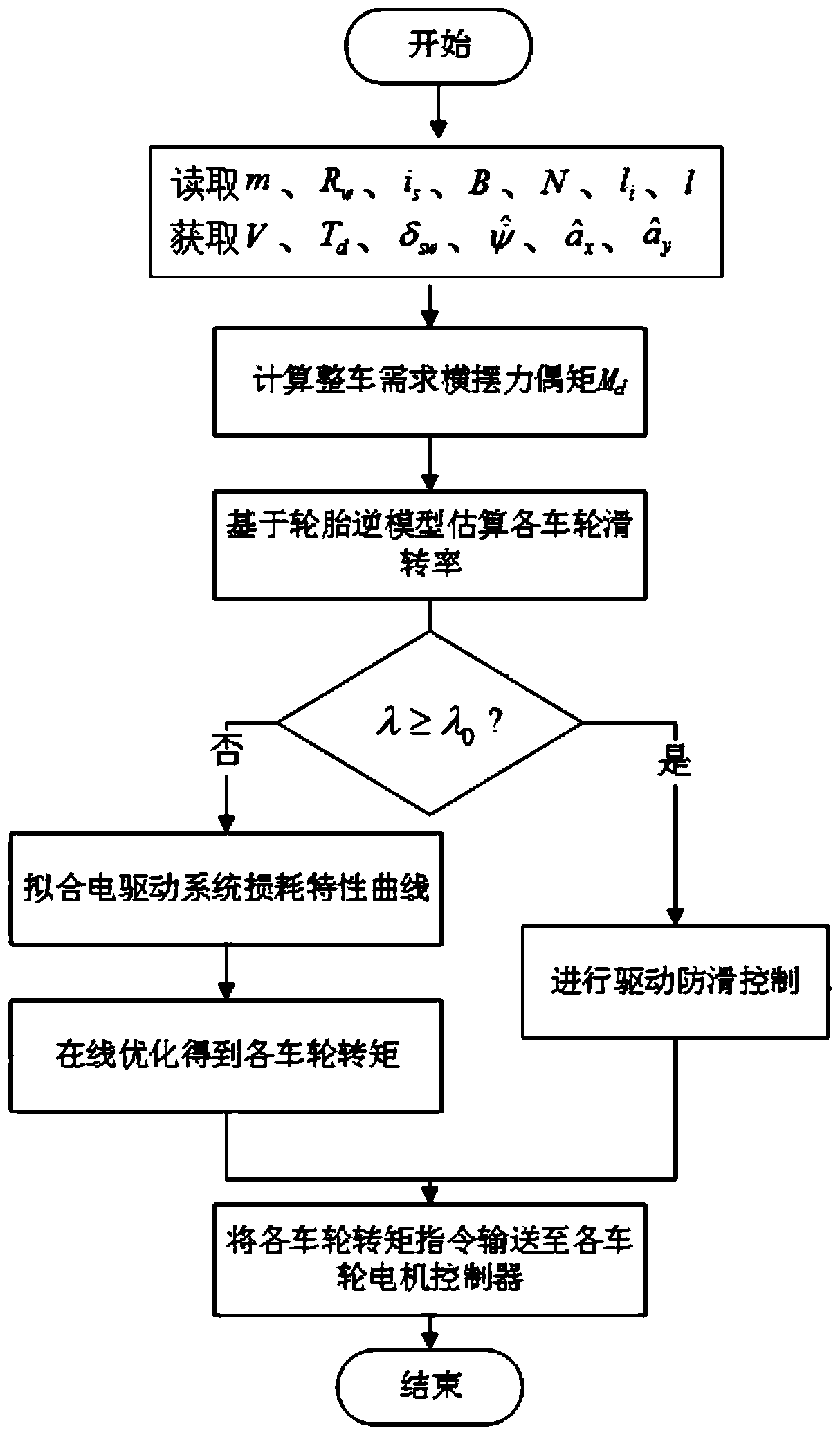
[0054] Such as figure 1 As shown, the present invention provides a multi-objective optimization method for wheel torque of an electric wheel drive vehicle based on the optimal overall performance of the vehicle, comprising the following steps:
[0055] Step 1. Obtain the basic parameters of the car, including vehicle mass m, wheel rolling radius R w , steering system angular transmission ratio i s , the vehicle wheelbase B, the number of driving axles N, the distance from each axle to the center of mass l i , the height H of the center of mass from the ground g , the vehicle wheelbase l, where, for a two-axle drive vehicle, the wheelbase l is the front and rear axle wheelbase, and for a multi-axle drive vehicle, l is the bogie wheelbase. And obtain the vehicle's driving s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More