

Road surface attachment coefficient and road surface gradient synchronous real-time estimation system and method for hub-motor-driven vehicle
A technology of road surface adhesion coefficient and hub motor, which is applied to vehicle components, driver input parameters, control devices, etc., can solve the problems that the accuracy of recognition results depends on the accuracy of the model, the utilization rate of algorithms is single, and the error of estimation results is large.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0109] The present invention will be further described below with reference to specific examples and accompanying drawings.
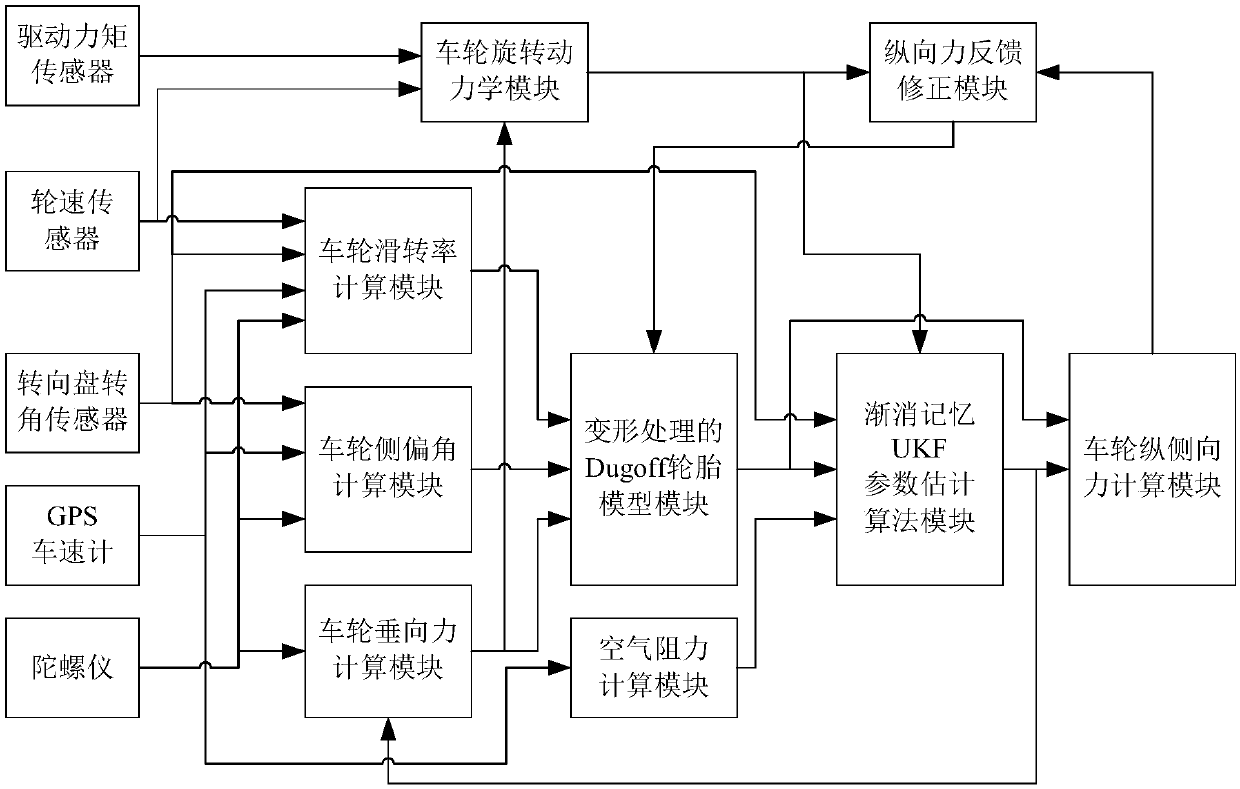
[0110] According to the analysis and summary of the estimation method of pavement adhesion coefficient and pavement slope, from the perspective of improving the accuracy of parameter estimation results and the utilization of the algorithm, an unscented Kalman filter with fading memory factor is adopted. On the one hand, by introducing fading memory On the other hand, the two variables of road adhesion coefficient and road slope are used to estimate the parameters in real time at the same time, so as to improve the utilization rate of the algorithm. Reduce the complexity of estimating models.
[0111] From the perspective of the tire model needed to estimate the road adhesion coefficient, in order to ensure the real-time performance of the algorithm and the convenience of algorithm design, the Dugoff tire model with better accuracy and applicability to w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More