

Alignment system and method for automatic charging of robots based on vision
An automatic charging and alignment system technology, which is applied to motor vehicles, control/regulation systems, instruments, etc., can solve the problems of two-dimensional codes that are easy to blur or wear, high hardware costs, and difficult identification, and achieve stable and reliable guidance and positioning. The cost of software and hardware is low, and the effect of cost reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0040] The technical solution of the present invention is a new vision-based automatic charging alignment system for robots, and this system is a complete set of software and hardware solutions.
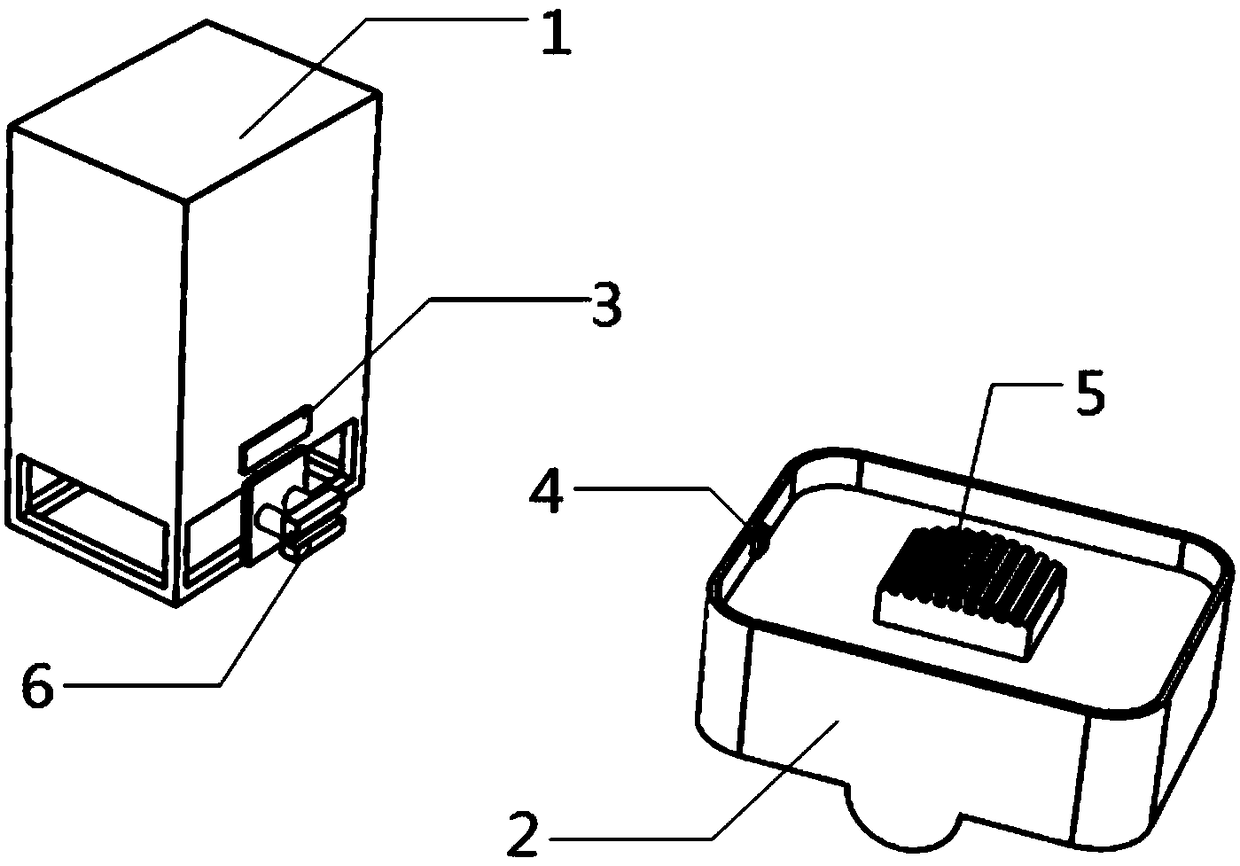
[0041] Among them, in terms of hardware, a visual guidance system is added to the charging pile 1 and the mobile robot 2 respectively. An example of the above hardware device is shown in figure 1 Shown:
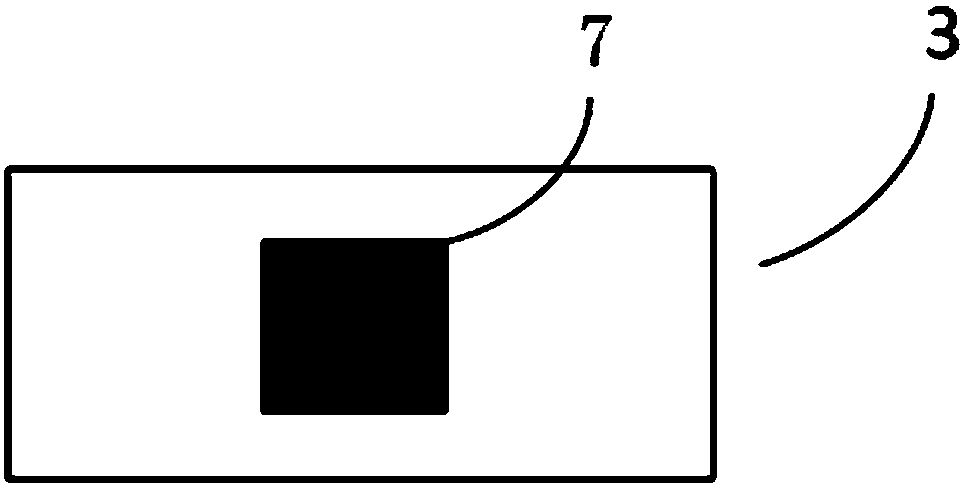
[0042]Among them, the active visual guidance device 3 is installed on the charging base, without loss of generality, the active visual guidance device 3 is equipped with a light source that can emit visible light or infrared light, and the light source has obvious shape or texture characteristics (any However, it is required that each side of the geometric shape has a straight line with equal side lengths, such as an isosceles triangle, a rectangle, a rhombu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More