

Control method for clutch starting engine of deep hybrid electric vehicle
A technology of hybrid electric vehicles and control methods, which is applied in the fields of hybrid electric vehicles, motor vehicles, transportation and packaging, etc., and can solve problems such as explosive torque uncertainty, drive train torque disturbance, and poor consistency of the whole vehicle. Achieve the effect of improving driving comfort, less software adjustment, and preventing vehicle shaking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
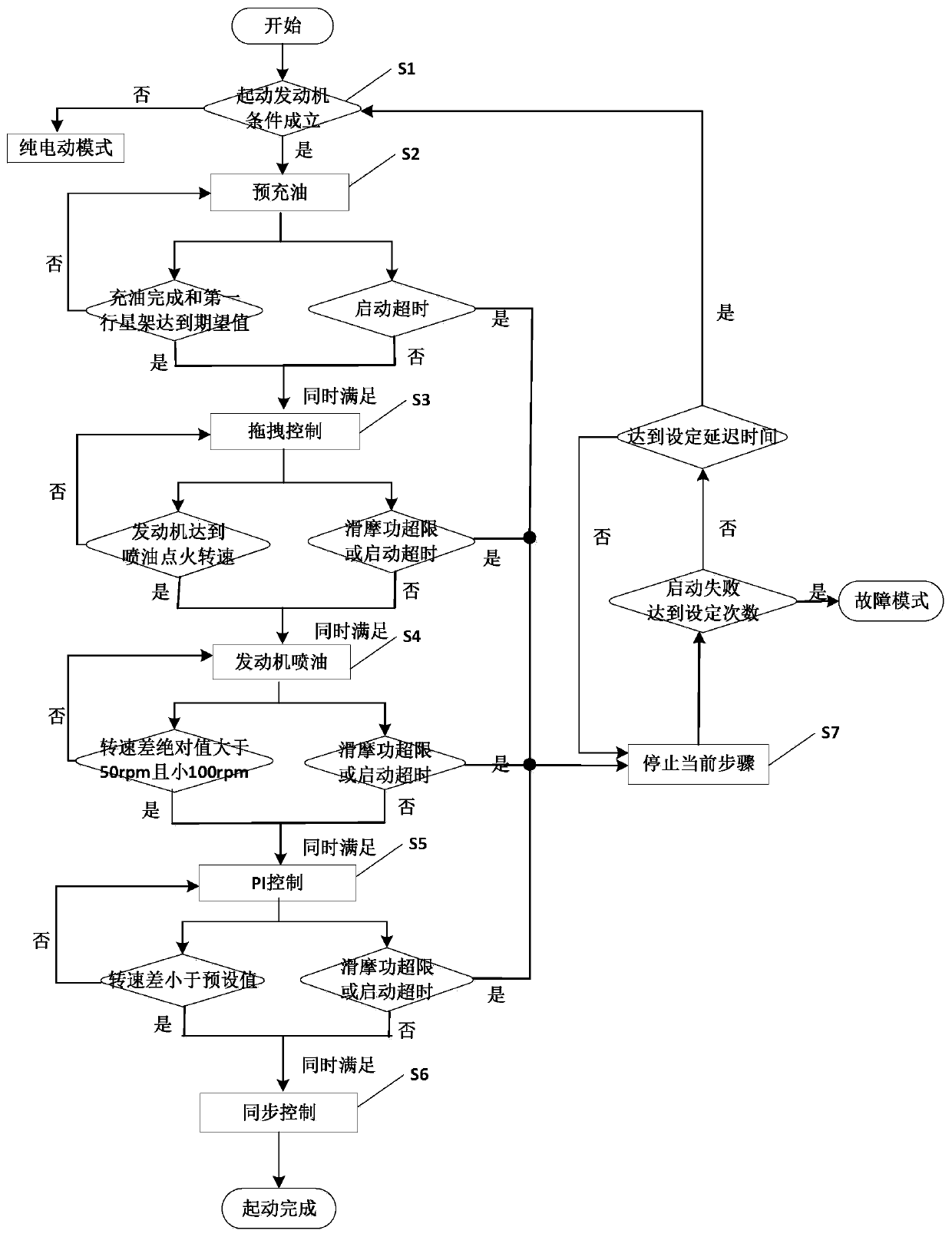
[0037] A control method for clutch starting engine of a deep hybrid electric vehicle, the control flow chart of which is as follows figure 1 shown, proceed as follows:
[0038] S1: The starting demand judging module obtains the current power battery power, expected wheel torque and vehicle speed. If the power battery power is less than the preset value A or the expected wheel torque is less than the preset value B and the vehicle speed is greater than the preset value C at the same time, where A is 30%, B is -50Nm, and C is 30km / h, then the starting demand judging module judges that the engine starting demand is yes, and executes step S2; otherwise, the vehicle maintains the pure electric mode operation;
[0039] S2: The vehicle controller controls the solenoid valve current to fill the first clutch with a constant pressure P1, P1 is 3.5bar, until the first clutch C1 is filled with oil, and controls the pressure of the first clutch to be the joint point pressure P2, P2 is 1.5...
Embodiment 2
[0055] A control method for clutch starting engine of deep hybrid electric vehicle, its method steps are similar to the steps of the control method for clutch starting engine of deep hybrid electric vehicle in embodiment 1, the difference is: in step S1, A is 25 %, B is -60Nm, C is 60km / h; in step S2, the constant pressure P1 is 5bar, the joint point pressure P2 is 1.0bar, and the preset expected speed of the first planetary carrier is n VM_soll is 1500rpm; t in steps S2-S5 lim is 8s; in step S3, the engine resistance torque is -40Nm, the engine inertia torque is calculated as -90Nm, and the preset engine fuel injection ignition speed threshold n is 500rpm; in steps S4 and S5, the preset engine first target Torque T vm_1 is 10Nm; in step S6, the preset engine second target torque T vm_2 is 200Nm; in step S5, the preset value D is 40rpm; in step S7, the preset failure times threshold E is 2 times, and the preset delay time threshold F is 1.5s.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More