

Six-dimensional force sensor based on image feedback, six-dimensional force sensing clamping probe based on image feedback and six-dimensional force sensing clamping apparatus based on image feedback
A six-dimensional force sensor and image technology, which is applied in the field of six-dimensional force sensor, clamping probe and clamping instrument, can solve the problems affecting minimally invasive surgery, lack of tactile sensing, and prolonging operation time, so as to improve efficiency and Effects of safety, quality improvement, and convenient handling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] In the six-dimensional force sensor based on image feedback, the clamping probe and the clamping instrument provided by the embodiments of the present disclosure, the detection method based on image feedback is adopted, so that the doctor can effectively understand the clamping between the end of the surgical instrument and the patient's human tissue Force, improve the efficiency and safety of surgery.
[0059] In order to make the purpose, technical solutions and advantages of the present disclosure clearer, the present disclosure will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
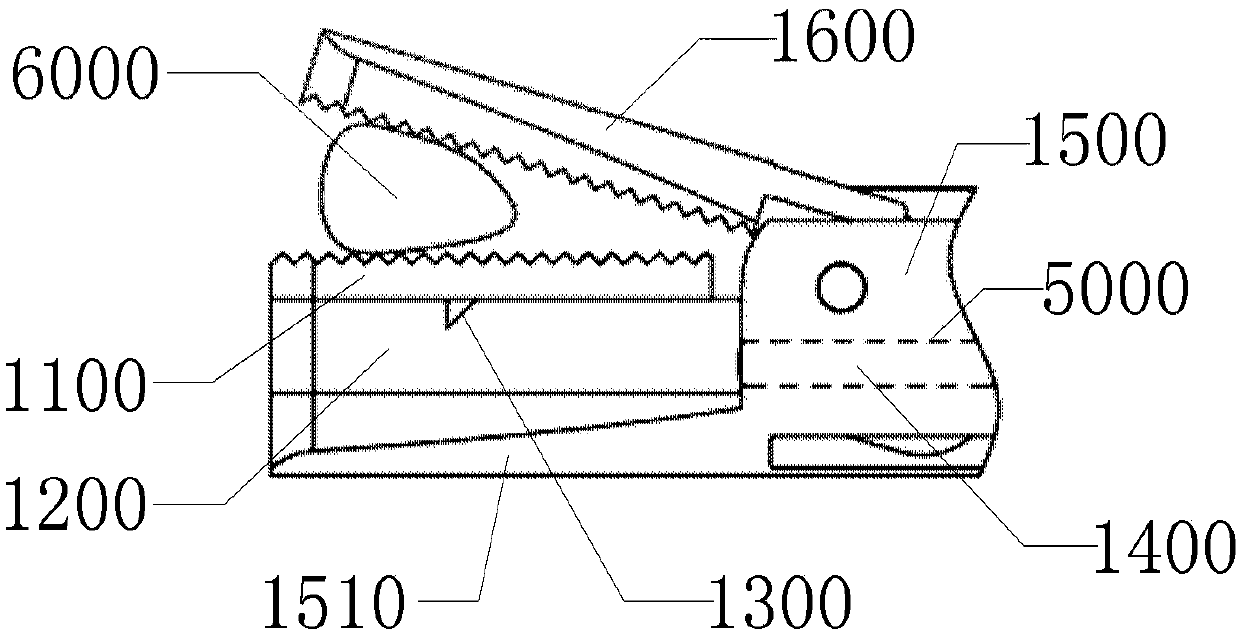
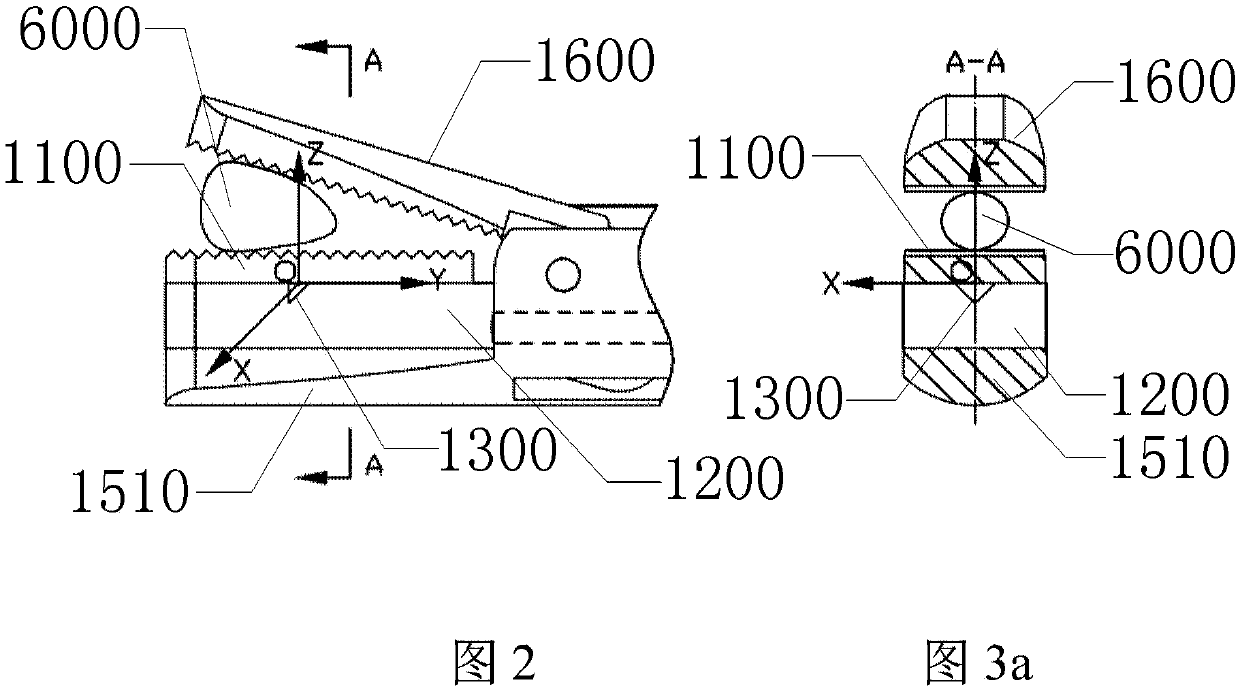
[0060] figure 1 It is a schematic structural diagram of a six-dimensional force sensing clamping probe based on image feedback according to an embodiment of the present disclosure.
[0061] According to one aspect of the present disclosure, a six-dimensional force sensor based on image feedback is provided, su...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More