

A virtual reality tactile feedback device based on ros system
A virtual reality, haptic feedback technology, applied in the input/output process of instruments, data processing, user/computer interaction input/output, etc., can solve the problem of not achieving hand motion control, lack of experience effect, poor mobility, etc. , to increase the fun, small size, easy to carry
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
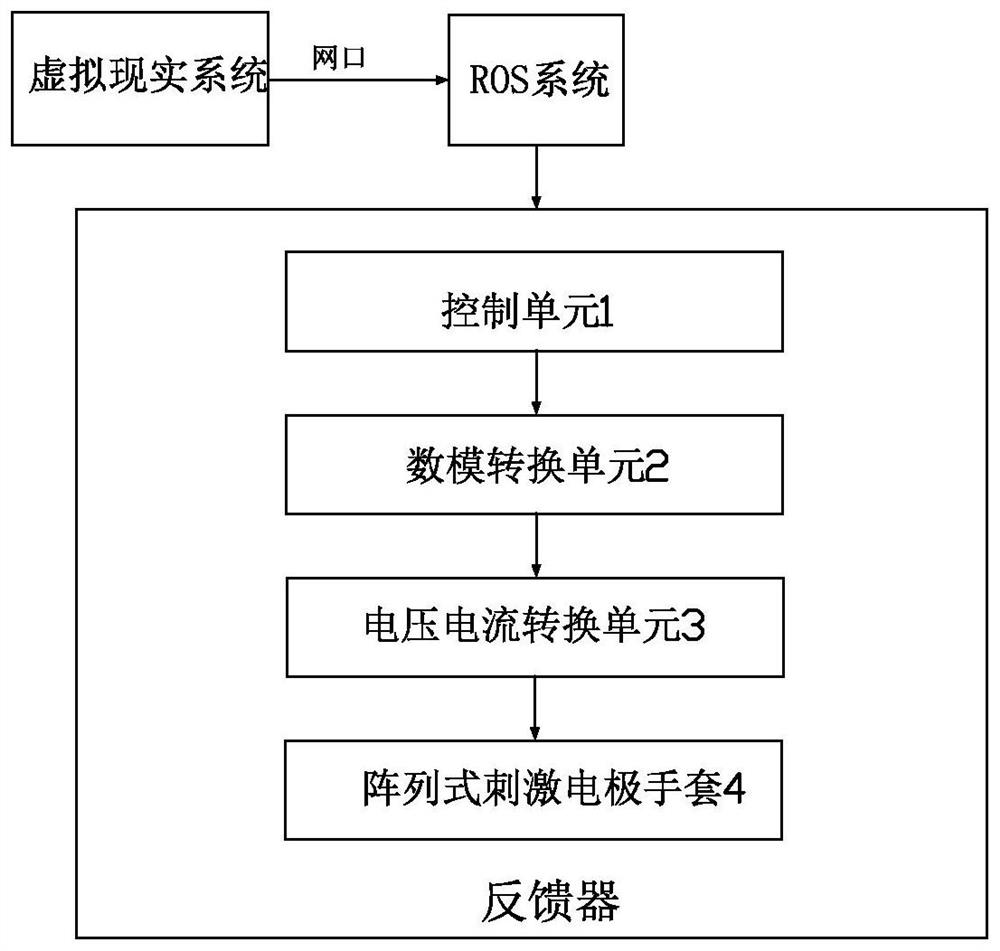
[0049] Embodiment 1 of the present invention provides a virtual reality haptic feedback device based on a ROS system, such as figure 1 shown, the feedback device includes:
[0050] The control unit 1 is used to receive the data transmitted by the ROS system, process it, and send an output voltage instruction to the digital-to-analog conversion unit 2 according to the processing result;
[0051]A digital-to-analog conversion unit 2 for outputting voltage;
[0052] The voltage-current conversion unit 3 is used for receiving the voltage output by the digital-to-analog conversion unit 2, and calculates a constant current and sends it to the array type stimulating electrode glove 4; the constant current I is calculated by the following formula:
[0053] I=U 1 -U 0 / R 0
[0054] U 1 is the input voltage, U 0 is the fixed resistor voltage, R 0 is a fixed resistance;
[0055] The array type stimulating electrode glove 4 is used for the user to wear and outputs a constant curr...
Embodiment 2
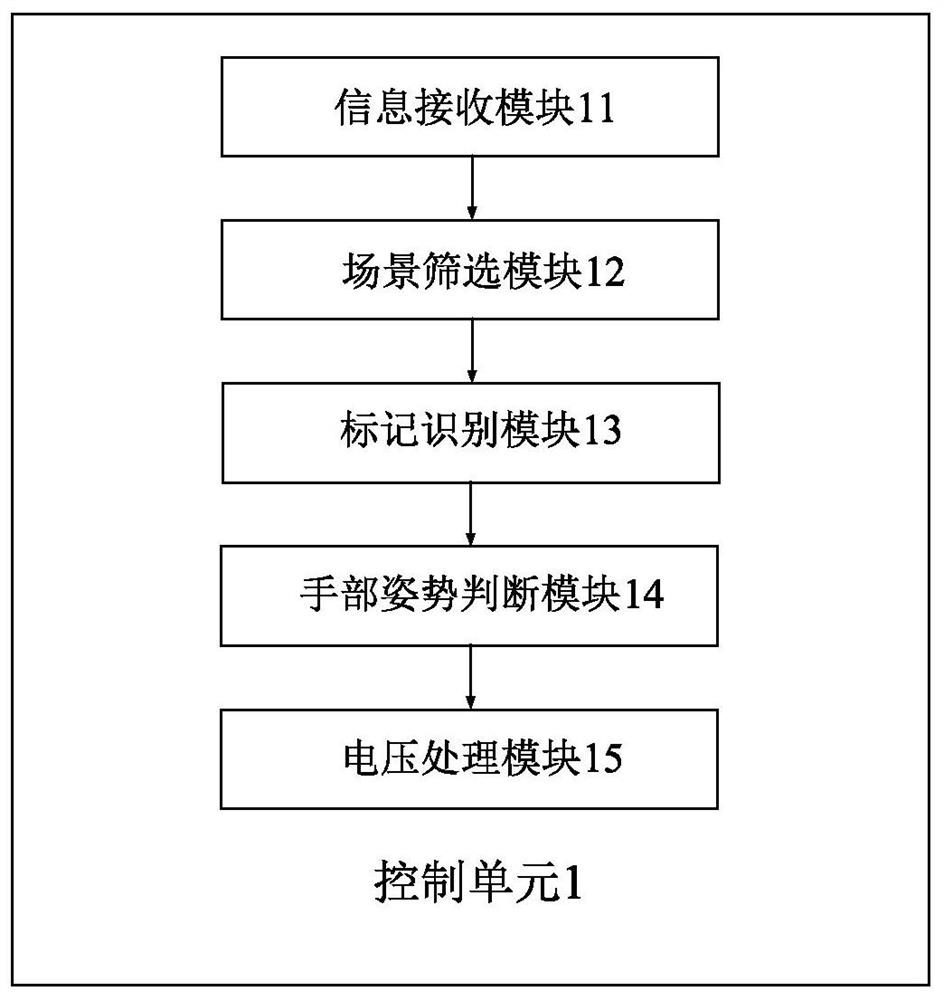
[0058] Embodiment 2 of the present invention provides a virtual reality haptic feedback device based on a ROS system, which is basically the same as that of Embodiment 1, except that, as figure 2 As shown, the control unit 1 includes:
[0059] The information receiving module 11 is used to receive the data transmitted by the ROS system;
[0060] The scene screening module 12 is used for screening out the data with the hand scene from the data received by the information receiving module 11;
[0061] Marker identification module 13, used to filter out the data with the mark from the data with the hand scene;
[0062] The hand posture judgment module 14 is used for judging the hand posture from the marked data, and obtains the hand posture data, the hand posture data includes the hand movement angle J 1 ;
[0063] The voltage processing module 15 is configured to send an instruction of outputting the voltage to the digital-to-analog conversion unit 2 according to the relatio...
Embodiment 3
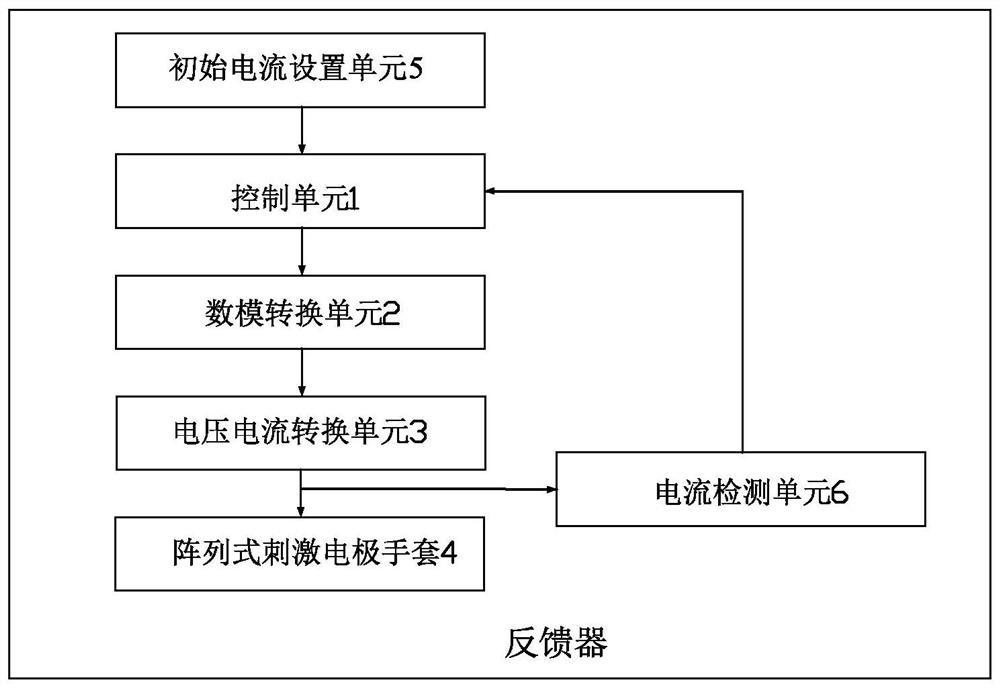
[0066] Embodiment 3 of the present invention provides a virtual reality haptic feedback device based on a ROS system, which is basically the same as that of embodiment 2, except that, as image 3 As shown, the feedback device further includes:
[0067] The initial current setting unit 5 is used to respectively set the maximum current value I for each user 大 and the minimum current value I 小 ;Because the physique of different people is different, the impedance of the human body and the feeling of the human body are also different, so each person must initialize the acceptable stimulation parameters, which are set through the adjustable buttons on the feedback device. The maximum current value and the minimum value current value, so as to avoid accidents during the experience;
[0068] The current detection unit 6 is used to record the constant current output by the voltage-current conversion unit 3 and send it to the control unit 1; to ensure that the output constant current ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More