

Observer-based stability analysis method for time-delay haptic interface system
A technology of interface system and analysis method, which is applied in the field of stability analysis of time-delay force sense interface system, and can solve the problems of obtaining observer gain and high conditional conservativeness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] The present invention will be described in more detail below in conjunction with accompanying drawing:
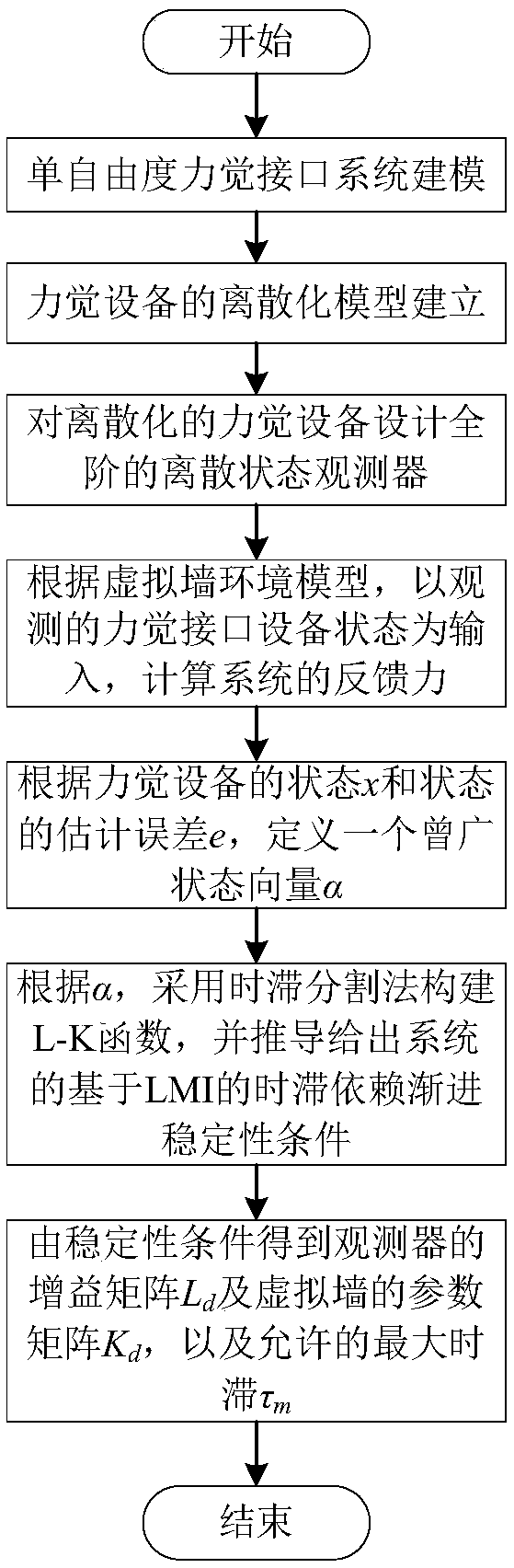
[0082] to combine figure 1 , 2 , 3, the present invention specifically comprises the following steps:
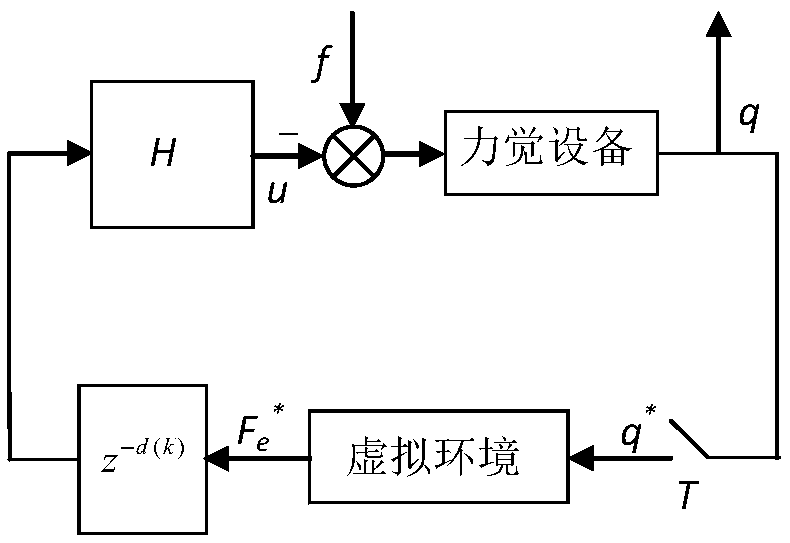
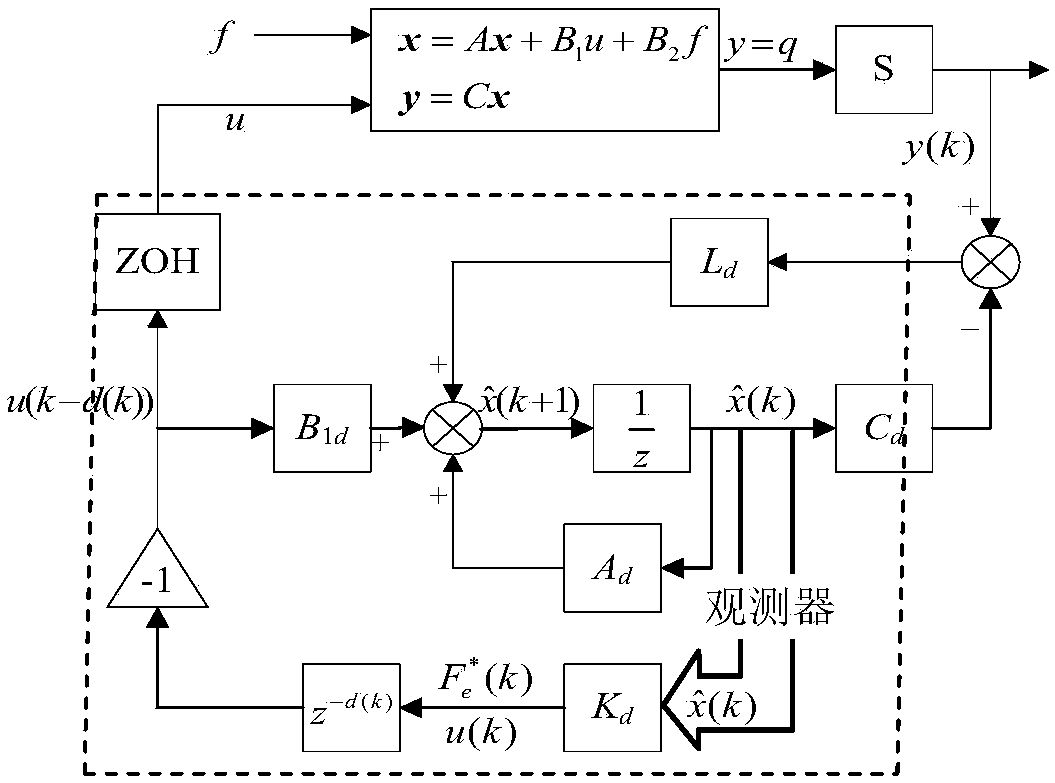
[0083] Step 1: According to the physical model of each link of the single-degree-of-freedom force-sensing interface system, establish the mathematical model of each part, and finally give the structural model of the entire closed-loop system. The system is a typical force feedback system, in which the virtual environment is equivalent to the controller part of the system, which is a discrete model realized by computer, while the object part—the force sensory device is continuous, and the system is a typical sampling control system . The virtual environment used here is a virtual wall, and the system also includes time-delay characteristics, zero-order holders and sampling switches. to combine figure 2 , mainly including the analysis and modeling of the force-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More