

Grinding and polishing robot
A robot and polishing wheel technology, applied in the field of polishing, can solve problems such as high noise, lack of precision polishing, and difficulty in ensuring the consistency of processed workpieces
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
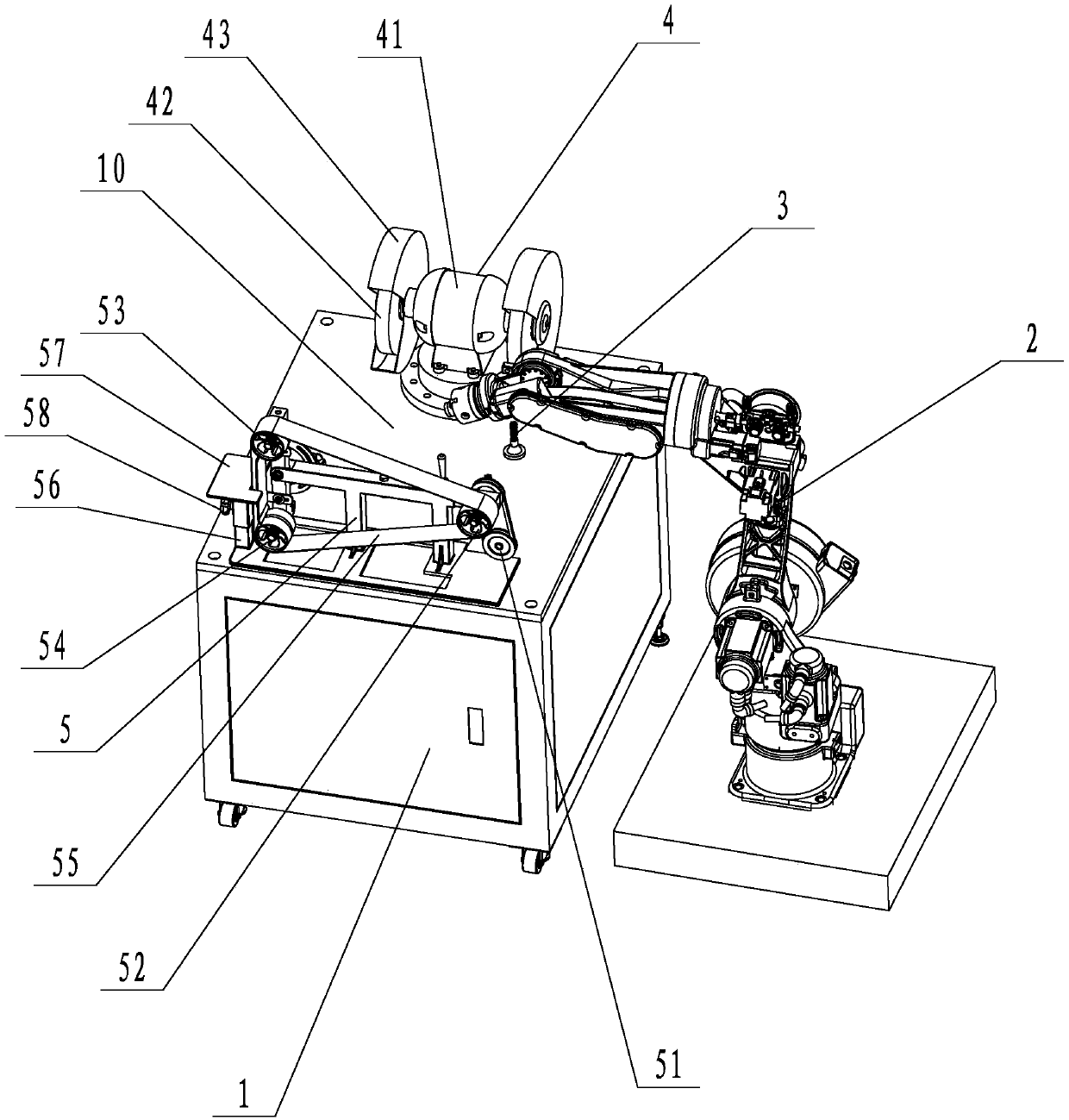
[0014] refer to figure 1 , a grinding and polishing robot of the present invention includes a polishing workbench 1 and a manipulator 2 that can move a workpiece. A working area 10 is arranged on the top, and a milling cutter 3 is arranged at the front end of the working area 10. A belt machine 5 and a polishing wheel mechanism 4 are respectively arranged on both sides of the milling cutter 3. The manipulator 2 is located on the polishing table 1 The front side of the milling cutter is close to 3 sides. When working, the conveying device transports the workpiece to the working area 10 of the polishing table 1, and then the manipulator 2 grabs and places the workpiece on the milling cutter 3 for surface milling, so that the size of the workpiece is more uniform before fine polishing, and then The manipulator 2 then grabs and moves th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More