

An upper limb rehabilitation robot based on binocular vision
A rehabilitation robot and binocular vision technology, applied in the field of medical rehabilitation, can solve the problems of inaccurate information collection, long natural recovery period and weak effect of upper limb hemiplegia patients, and achieve accurate information collection, obvious rehabilitation effect, and avoid direct contact. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention is further described in conjunction with the following examples.
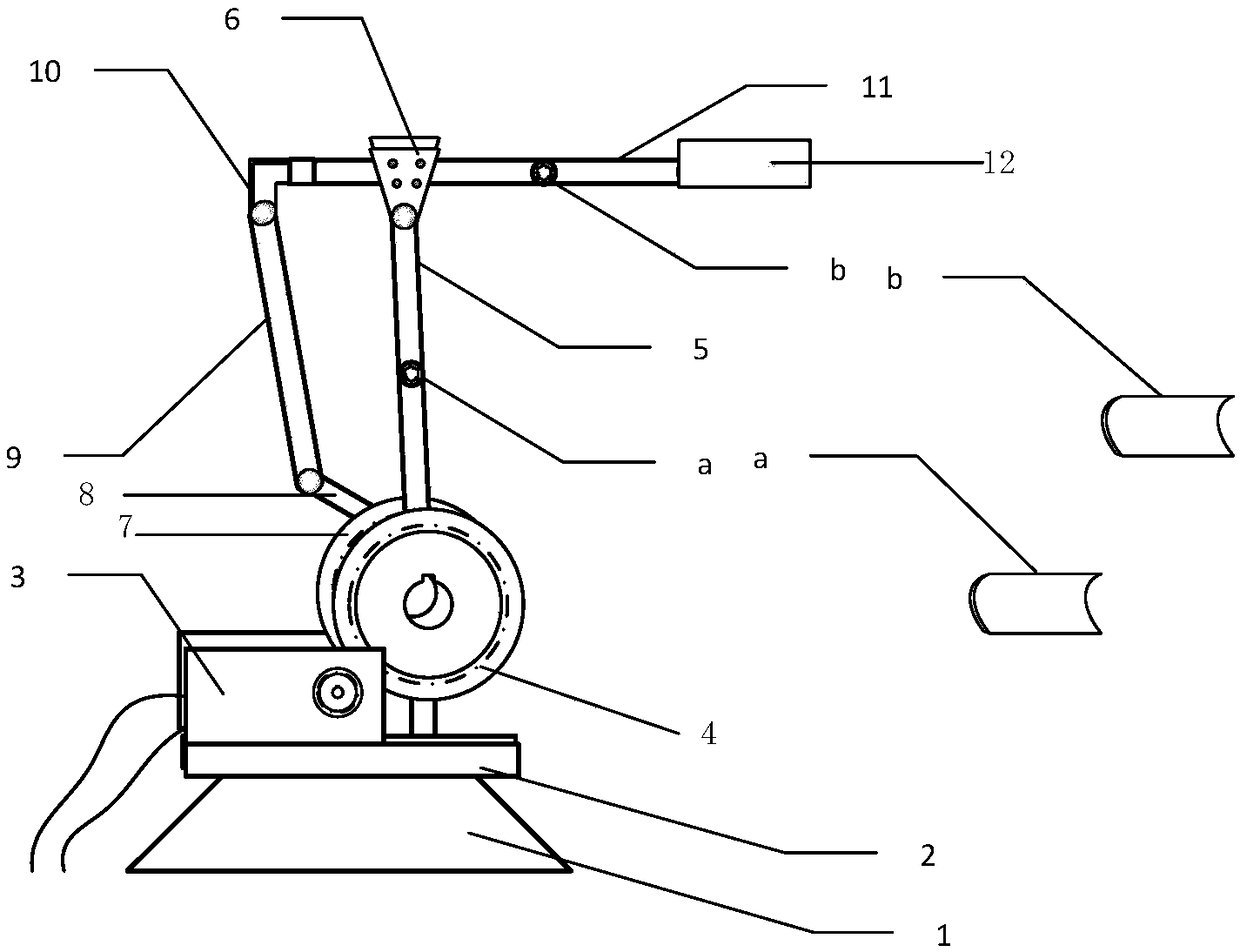
[0030] see figure 1, the external fixing sleeve a of the main arm is fixed to the main arm 5 through the connecting rod, the external fixing sleeve b of the auxiliary arm is fixed to the auxiliary arm 11 through the connecting rod, and the external fixing sleeve of the main arm and the external fixing sleeve of the auxiliary arm Both the fixing sleeve and the end fixing piece 12 are equipped with length-adjustable flexible belts, which are used for fixing the arm and the mechanical structure; The two screws are located on both sides of the main arm to form an interlock, and the connecting rod is tightly fixed on the main arm. When it is necessary to switch the training arm, it can be switched easily and quickly, and the same is true for the auxiliary arm.
[0031] see figure 1 , the waist rotary joint 2 is mounted on the base assembly 1 through a bearing, and the waist rotary moto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More