

Robot grinding device and grinding method based on six-dimensional force sensor and binocular vision
A technology of six-dimensional force sensor and binocular vision, which is applied in the direction of grinding machine tool components, grinding/polishing equipment, workpiece feed movement control, etc., can solve the problem of six-dimensional force sensor measuring structural damage, six-dimensional force sensor Damage, incomplete grinding information, etc., to achieve good grinding efficiency, good grinding effect, and good control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific preferred embodiments.
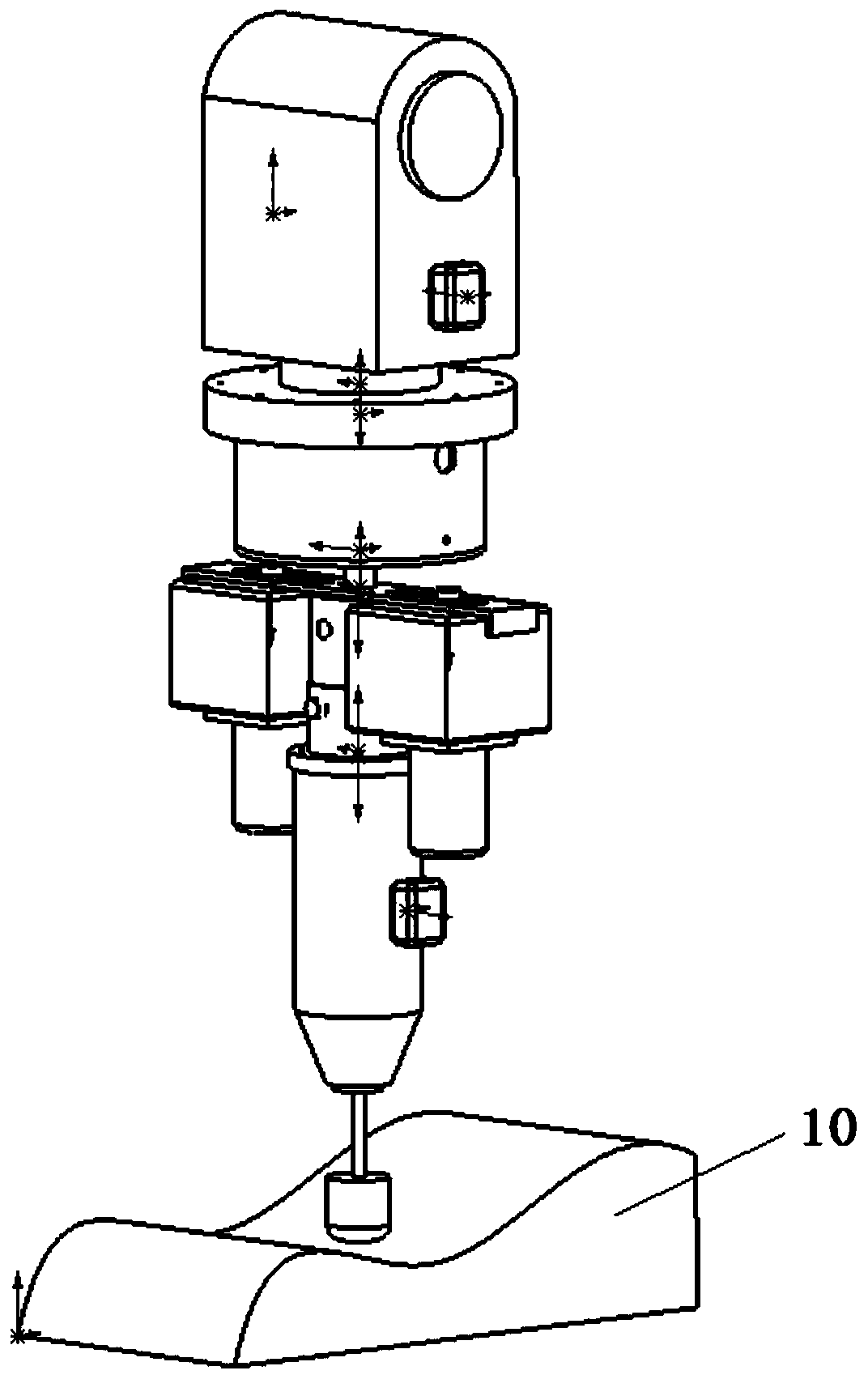
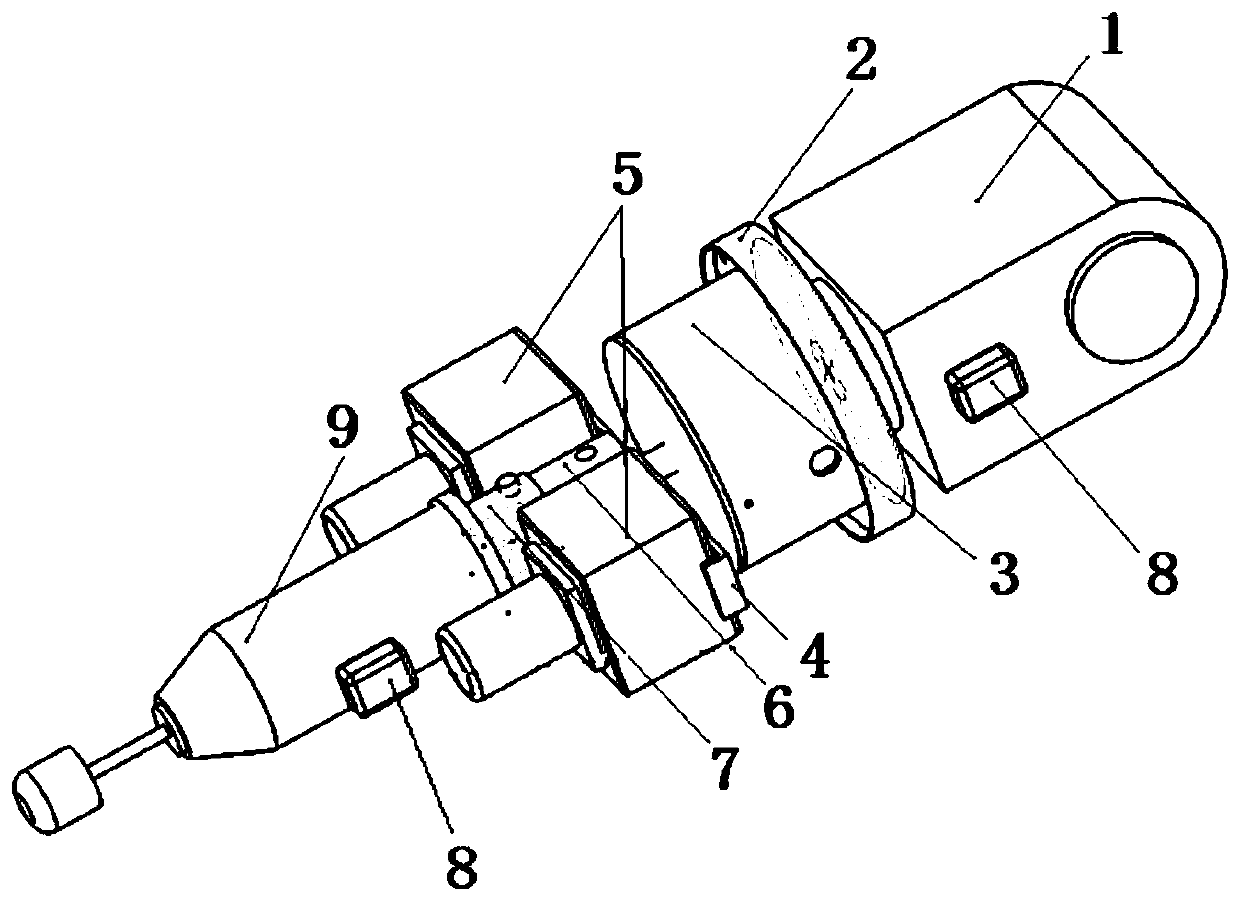
[0053] Such as figure 1 and figure 2 As shown, a robot grinding device based on a six-dimensional force sensor and binocular vision, including a mechanical arm 1, a sensor holder 2, a six-dimensional force sensor 3, a camera bracket 4, an industrial camera 5, a flexible connector 6, and a motor fixing Seat 7, grinding motor 9 and biaxial acceleration sensor 8.
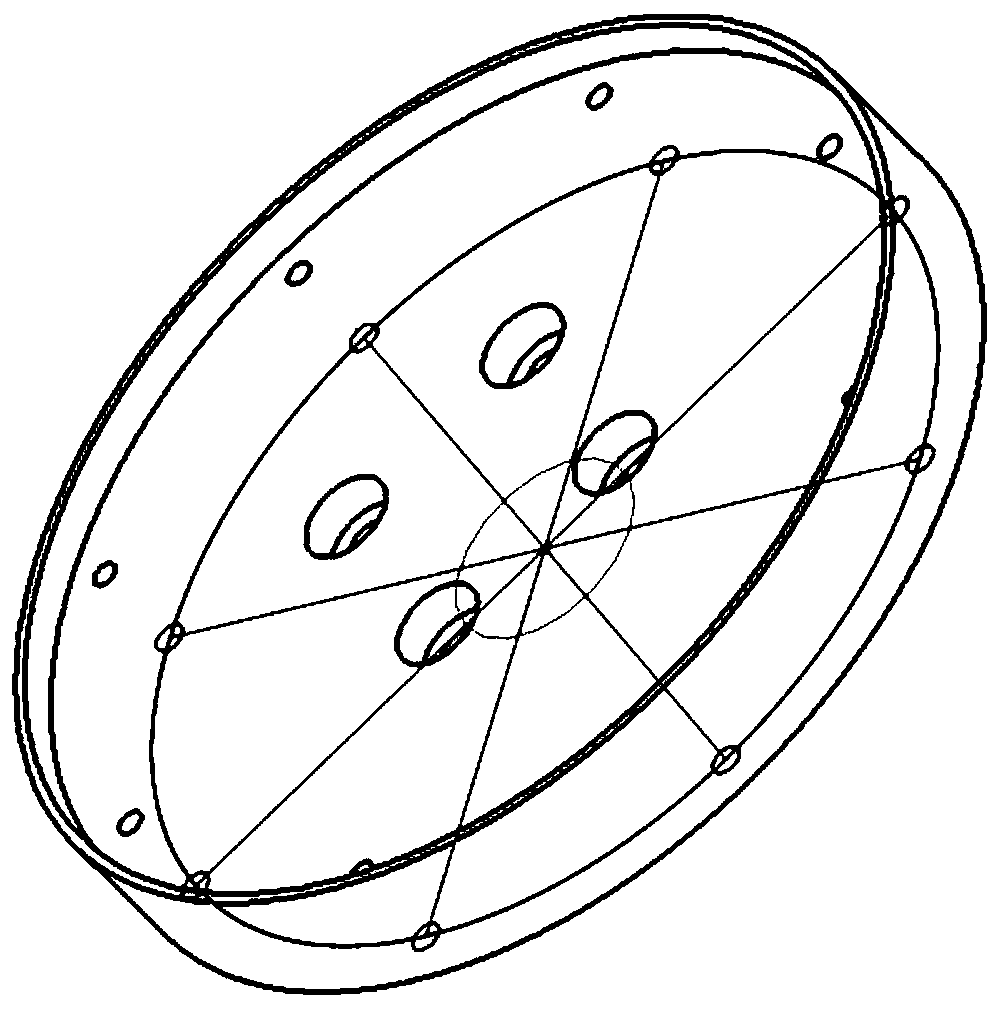
[0054] The six-dimensional force sensor is fixedly connected to the end joint of the mechanical arm through the sensor holder. The structure of the sensor holder is as follows: image 3 shown.
[0055] The six-dimensional force sensor is flexibly connected to the motor holder through a flexible connector. The flexible connector is preferably a cylinder made of rubber material, and the cylinder preferably has a diameter of 30 mm and a height of 50 mm. One end of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More