

Closed-loop control system and control method of unmanned aerial vehicle
A closed-loop control, unmanned aerial vehicle technology, applied in the control/regulation system, attitude control, non-electric variable control and other directions, can solve the problems of high power consumption, high cost, error-prone distance judgment, etc., to achieve ranging and positioning accuracy High, algorithmically simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
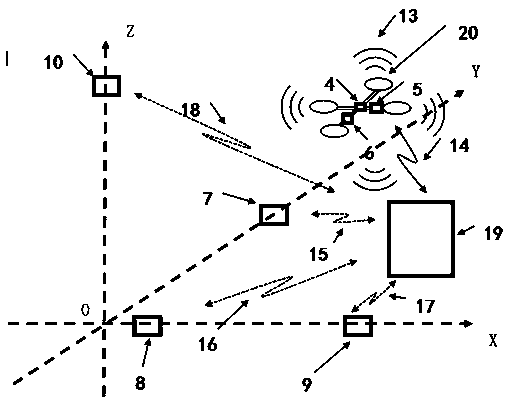
[0056] Such as figure 1 Shown is a schematic diagram of the space three-dimensional coordinate system O-XYZ and the UAV closed-loop control system constructed in the embodiment of the present invention. refer to figure 1 , in the space three-dimensional coordinate system O-XYZ and the illustration labels in the UAV closed-loop control system are as follows:
[0057] The three-dimensional coordinate system O-XYZ of the space, where O is the origin of the coordinate system;
[0058] Labels 4, 5, 6: acoustic wave emitters;
[0059] Labels 7, 8, 9, 10: acoustic wave receivers;
[0060] Label 13: acoustic signal;
[0061] Label 14: synchronous command signal (that is, electromagnetic wave signal);
[0062] Labels 15, 16, 17, 18: information channels between the closed-loop control system processor and each acoustic wave receiver;
[0063] Label 19: Closed-loop control system processor;
[0064] Label 20: UAV.
[0065] In this embodiment, the UAV closed-loop control system i...
Embodiment 2
[0082] The inventor further studies that the flight controller of the UAV mainly includes: sensors such as accelerometers, gyroscopes, and magnetometers, and real-time processors. Its function is to measure and control the flight attitude of the UAV. Therefore, the inventor considers whether The function of the flight controller can be replaced by other means.
[0083] Specifically, by arranging multiple acoustic wave transmitters on different parts of the airborne platform of the UAV 20, multiple acoustic wave transmitters can transmit acoustic wave signals in a time-division multiplexed or frequency-division multiplexed manner. The positioning process of Embodiment 1 locates the respective coordinate positions of each sound wave emitter, and then calculates the real-time attitude and real-time position of the UAV during flight according to the relative positional relationship between a plurality of sound wave emitters and the UAV body (that is, The center position coordinate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More