

Control method for radial suspension support system of vehicle-mounted flywheel battery based on working conditions
A flywheel battery and support system technology, applied in the direction of reasoning method, adaptive control, general control system, etc., can solve problems such as system out of control, achieve fast response speed, good control effect, and good nonlinear mapping effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
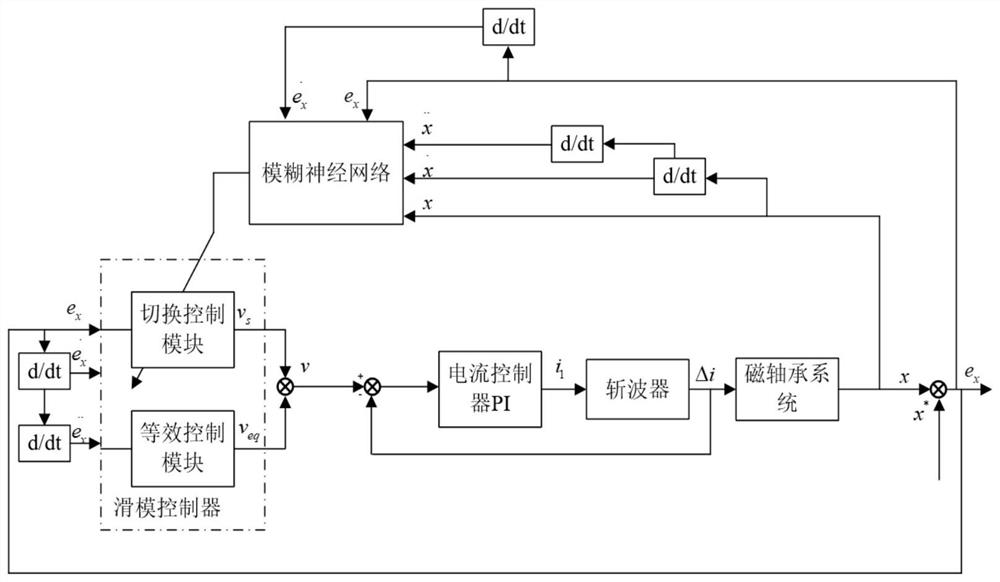
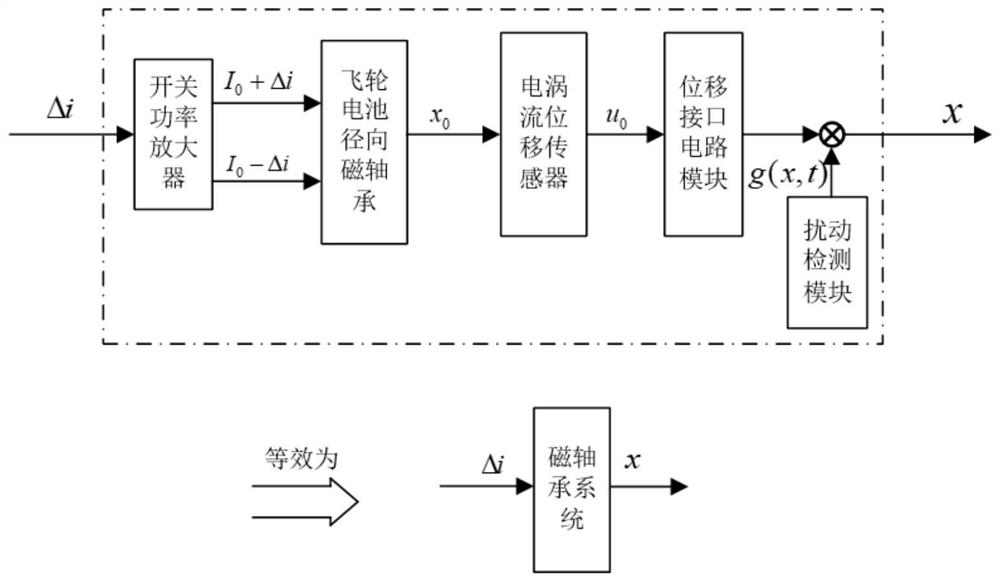
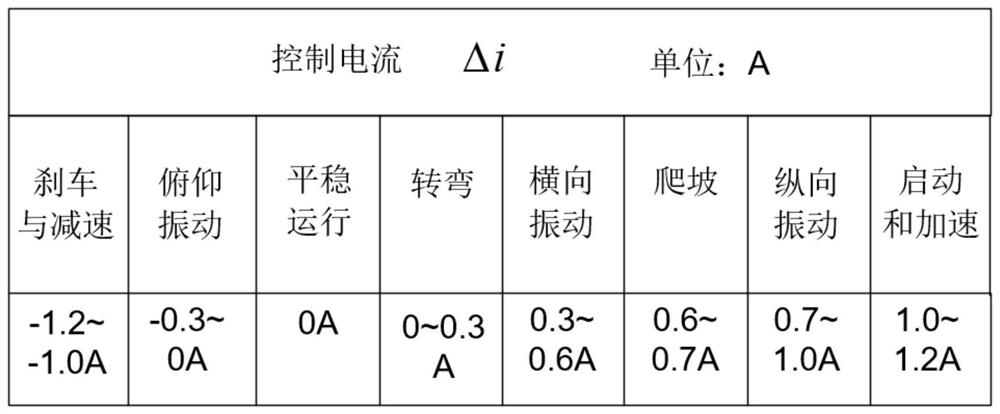
[0111] like figure 1 First, take the magnetic bearing system as the controlled object, use the dynamic test of the prototype and ADAMS simulation to establish different working conditions of the flywheel battery (smooth running, starting and accelerating, braking and decelerating, turning, climbing, longitudinal vibration, lateral vibration and pitch vibration) of the rotor dynamics model of the magnetic bearing system and the state equation of the system; different working conditions are distinguished by the magnitude of the control current; the output x of the magnetic bearing system is related to the target air gap x * Make a difference to get the air gap error e x ; based on the air gap error e x and the flywheel rotordynamic model and the equation of state of the flywheel rotor system, and will Enter the sliding mode controller, design the sliding mode switching surface and the sliding mode controller including the equivalent control and switching control, and obtain t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More