

Brand new numerical control robot multi-coordinate measurement system and measurement method
A measurement system and robot technology, applied in measurement devices, instruments, etc., can solve problems such as inability to meet workpiece measurement requirements, and achieve the effect of multi-flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0063] Embodiment one of the measuring method: the measurement of the straight-line distance between two points of a workpiece, this embodiment comprises the following steps:
[0064] S310: The user selects the test requirement of "measure the straight-line distance between two points" from the measurement requirement menu on the display screen through the human-computer interaction unit,
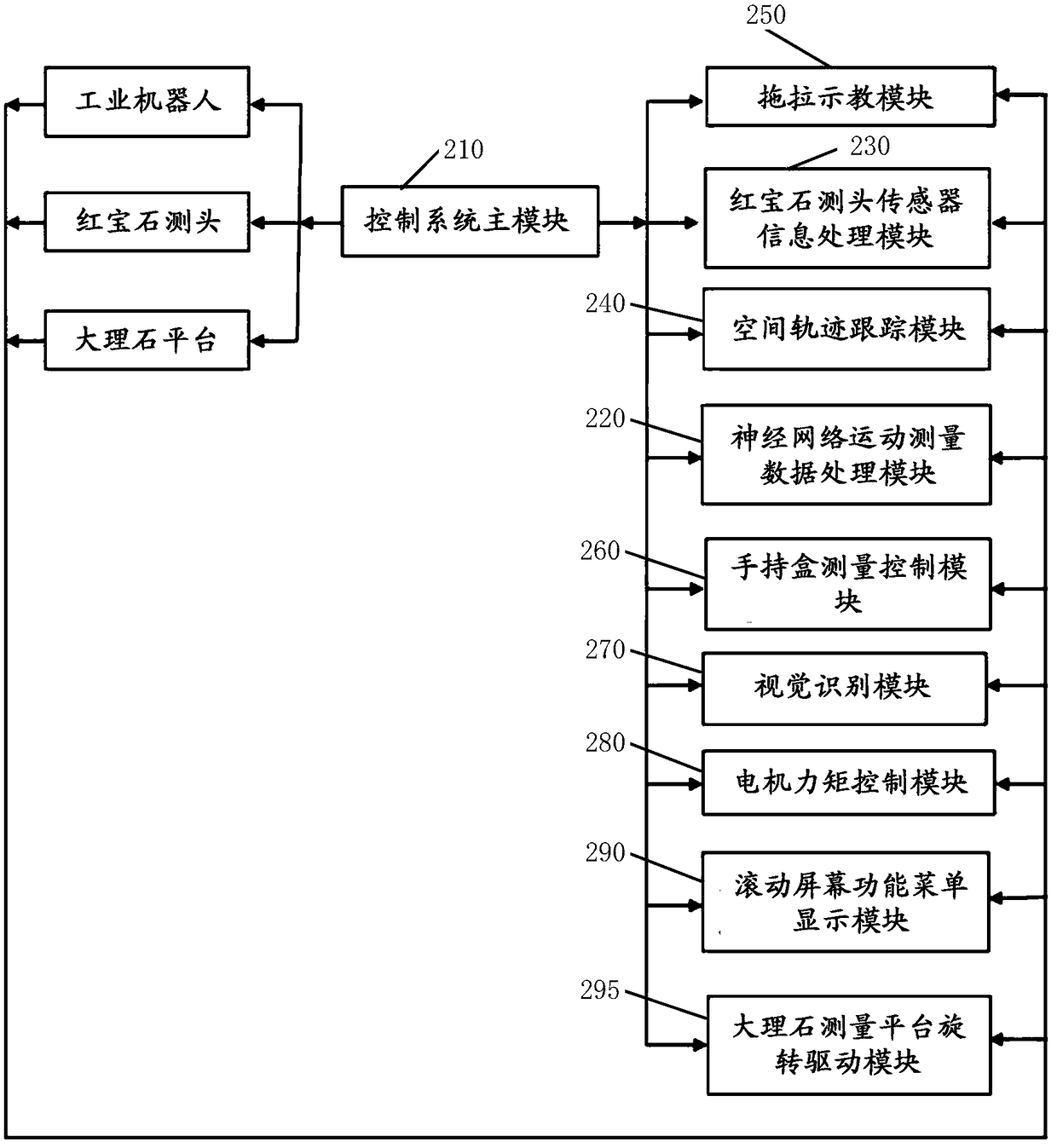
[0065] S320: The main control program module 210 obtains the test requirements, and transfers the corresponding linear measurement mathematical model from the neural network motion measurement data processing module 220 to the memory for backup;
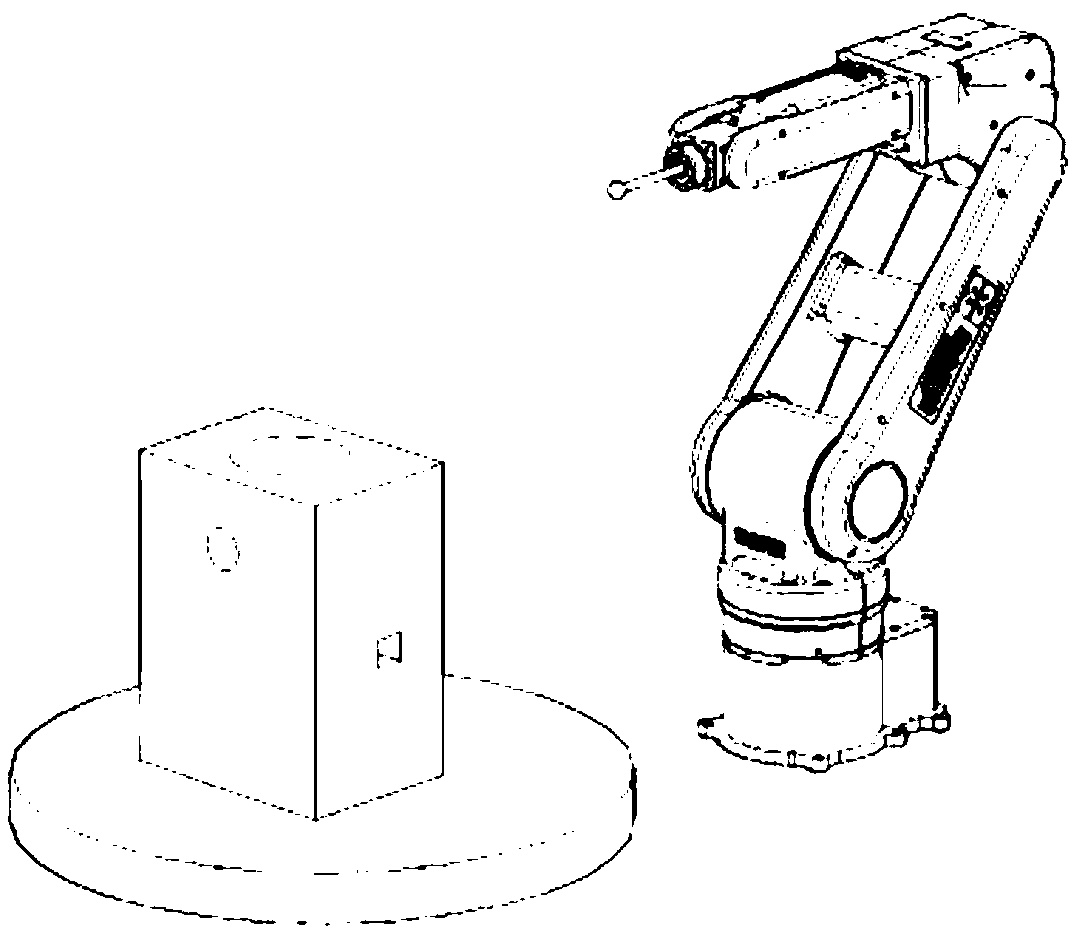
[0066] S330: The user controls and drags the robotic arm through the hand-held box, and drags the robotic arm to two selected measurement points of the workpiece to perform sampling operations respectively, so that the two measurement points are in contact with the ruby measuring head, and the end of the ruby measuring head After the pressure ...
Embodiment 2
[0071] Embodiment two of the measuring method: to the measurement of the angle between two line segments, this embodiment comprises the following steps:
[0072] S410: The user selects the test requirement of "measure the angle between two line segments" from the measurement requirement menu on the display screen through the human-computer interaction unit,
[0073] S420: Obtain the test requirement by the main control program module 210, and call the corresponding angle measurement mathematical model between two line segments from the neural network motion measurement data processing module 220 to the memory for backup;
[0074] S430: The user controls and drags the robot through the hand-held box, and drags the ruby probe at the end of the robot to the three measurement points selected by the workpiece to operate respectively, so that the three measurement points are in contact with the ruby probe, and the end of the ruby probe The pressure sensor sends out a pulse sig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More