

Underwater 3D reconstruction device and method based on multilayer refractive model of light field
A 3D reconstruction and model technology, applied in measuring devices, water resources assessment, open-air water source survey, etc., achieves the effects of convenient operation, compact device layout, and high point cloud reconstruction accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
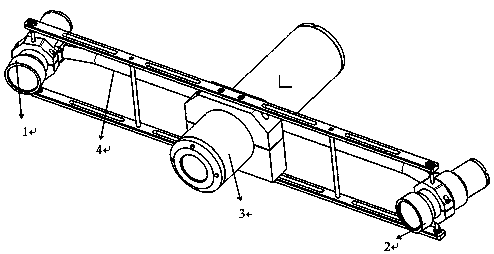
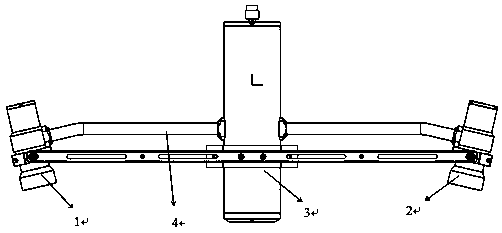
[0044] Embodiment one: see Figure 1 ~ Figure 4 , the underwater three-dimensional reconstruction device based on the light field multilayer refraction model, comprising two high-speed camera packaging chambers (1, 2) and a laser scanning system and computing unit packaging chamber (3), characterized in that the two high-speed The camera packaging compartments (1, 2) are symmetrically installed at both ends of a high-pressure resistant connecting pipe (4), and the laser scanning system and the computing unit packaging compartment (3) are installed in the middle; the laser scanning system includes a metal pendulum mirror (6) and A laser (5), when swinging, the line laser emitted by the laser (5) can be scanned in the field of view of the camera; since there is no watertight connector that can meet the USB3.0 transmission rate underwater, the internal connection method can ensure the transmission Speed, and reduce the number of connectors, improve system stability.
Embodiment 2
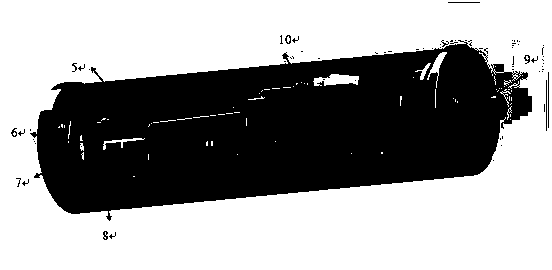
[0045] Embodiment two: see Figure 5 ~ Figure 7 , the underwater three-dimensional reconstruction method based on the light field multi-layer refraction model, using the above-mentioned device for operation, is characterized in that the operation steps are as follows:
[0046] Step a: Carry out single-camera calibration on the left camera and the right camera respectively in the air, and obtain the internal parameter camera matrix cameraMatrixL, cameraMatrixR and distortion distortionL, distortionR of the single camera;
[0047] Step b: Use the "Calibration Method for Underwater Stereo Vision System Based on Multilayer Refraction Model" in Chinese Patent CN201710702222.1 to calibrate the camera in the pool to obtain the refraction parameters (n L , d L , miu L ), (n R , d R , miu R ) and the extra-stereo parameter t l_r , R l_r ;
[0048] Step c: Take a group of clear pictures with targets in the measurement sea area, and measure the refractive index μ of the sea water...
Embodiment 3
[0051] Embodiment three: this embodiment is basically the same as embodiment two, and the special features are as follows:
[0052] The camera calibration in the step b comprises the following steps:
[0053] Step (b-1): Photograph the checkerboard calibration board in the pool. Randomly select 8 positions between 1m and 2m to take pictures. The pictures are roughly in the middle of the field of view of the two cameras.
[0054] Step (b-2): Use the Harris corner detection method to extract the corner points of the captured checkerboard picture, and use the pre-calibrated single-camera calibration parameters cameraMatrixL, cameraMatrixR, distortionL, distortionR to remove distortion from the corner coordinates;
[0055] Step (b-3): Select the initial value of the parameters to be calibrated, take the initial value of the normal n=[001] and the initial value of the refractive index miu=[11.51.33], iteratively calculate the refraction parameters of the two cameras (n L , d L ,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More