

Unmanned aerial vehicle autonomous inspection method based on power transmission channel three-dimensional radar scanning data
A power transmission channel and unmanned aerial vehicle technology, which is applied in the field of unmanned aerial vehicles, can solve the problems of high technical level and business ability requirements of inspection operators, unmanned aerial vehicles touching wires, etc., and achieve the goal of reducing skill requirements and improving efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The technical solutions of the present invention will be further described in more detail below in conjunction with specific embodiments. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
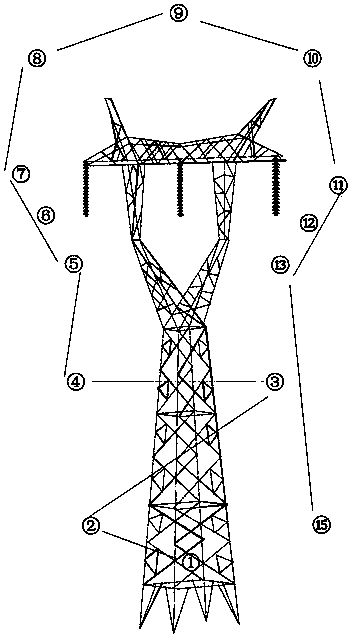
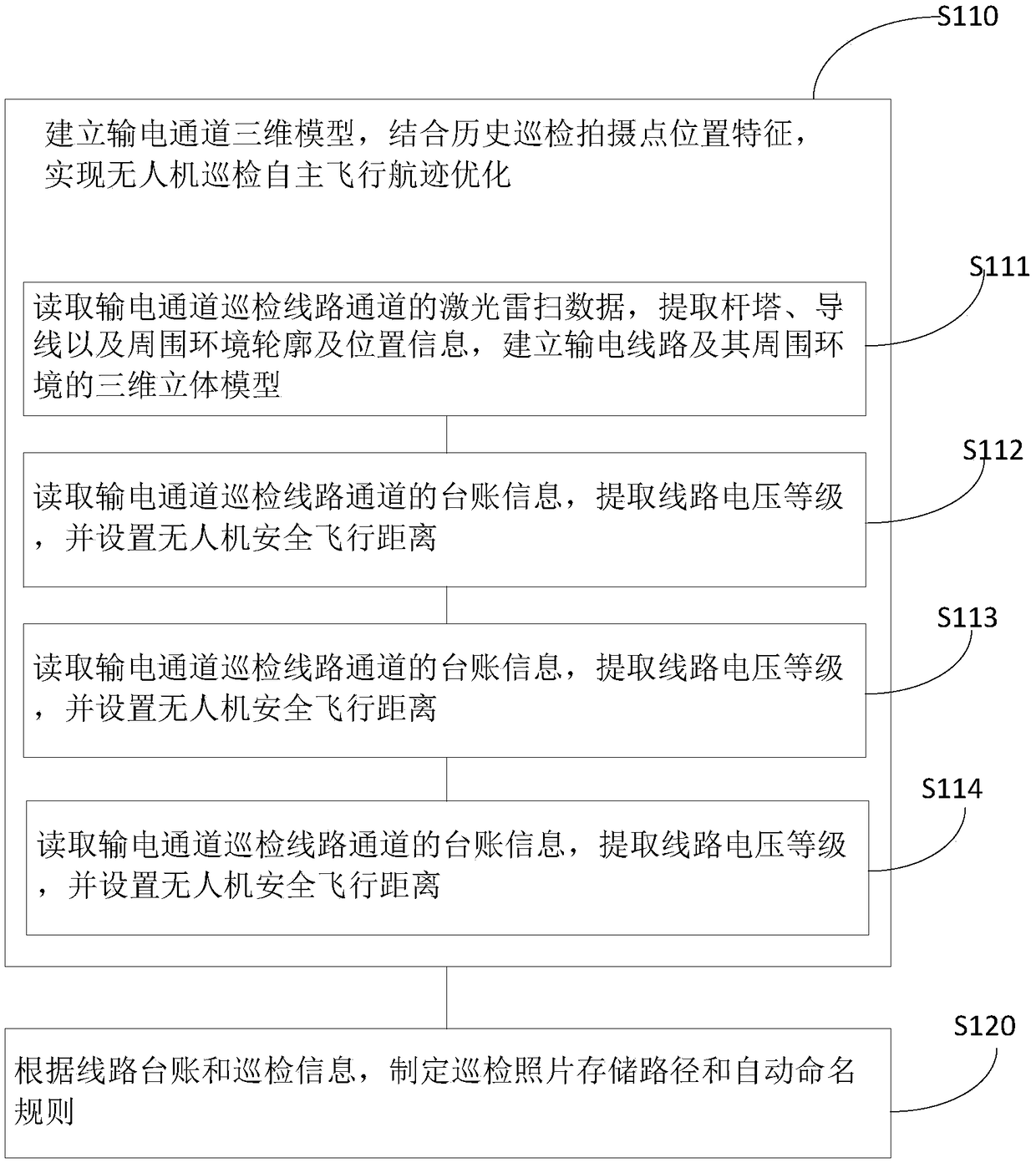
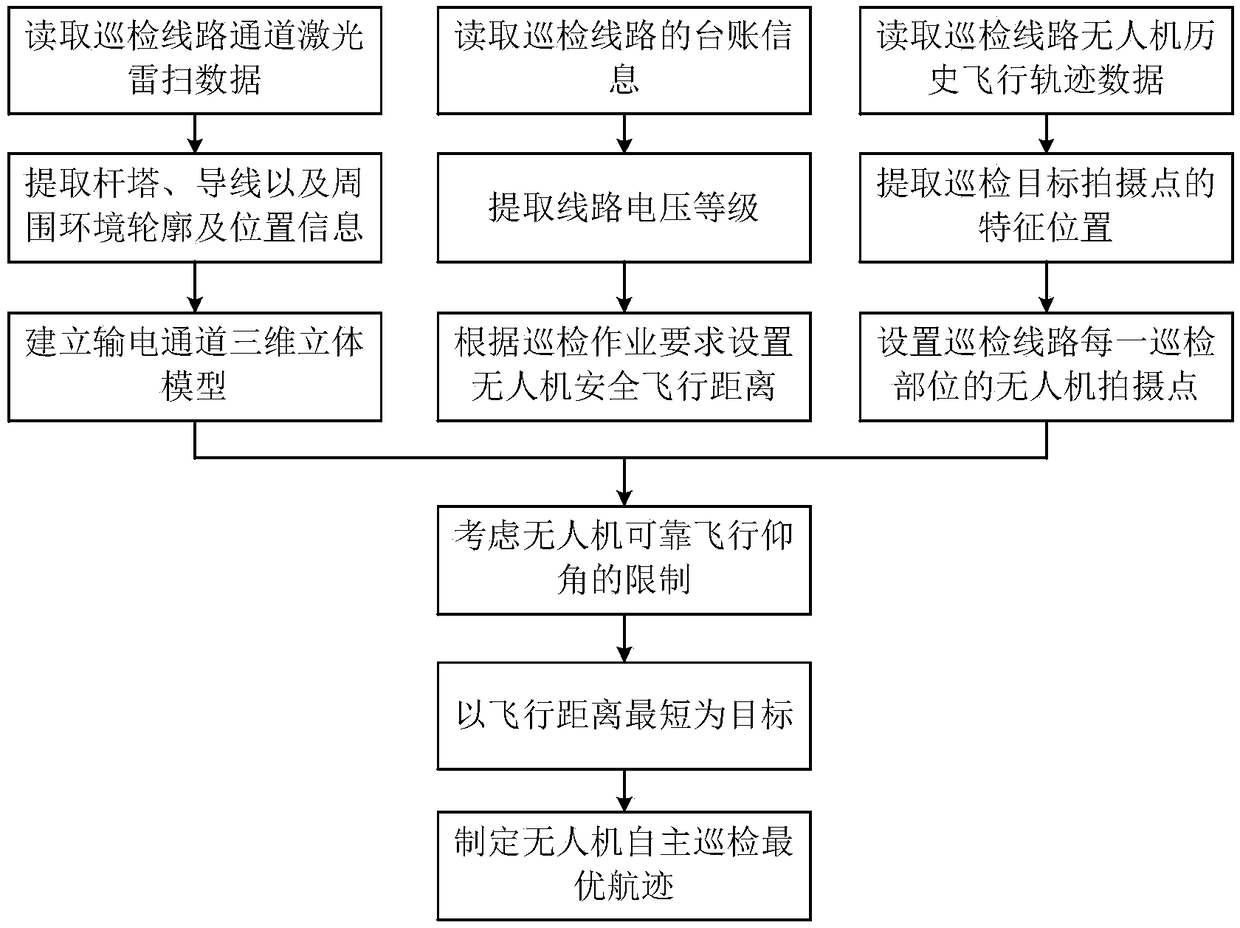
[0023] refer to figure 1 , figure 1 It is a schematic flow chart of a UAV autonomous inspection method based on the three-dimensional mine sweep data of the power transmission channel provided by the present invention. The steps of the method include
[0024] S110: Establish a three-dimensional model of the power transmission channel, and combine the location characteristics of the historical inspection shooting points to realize the optimization of the autonomous flight track of the UAV inspection.
[0025] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More