A frog-like swimming leg employing an underactuated series software aerodynamic bending module
An under-actuated, soft technology, applied in the field of robotics, can solve the problems of poor waterproof sealing, large mass and volume, reduce the bearing capacity, simplify the production process, and avoid the effect of weak bonding and tearing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
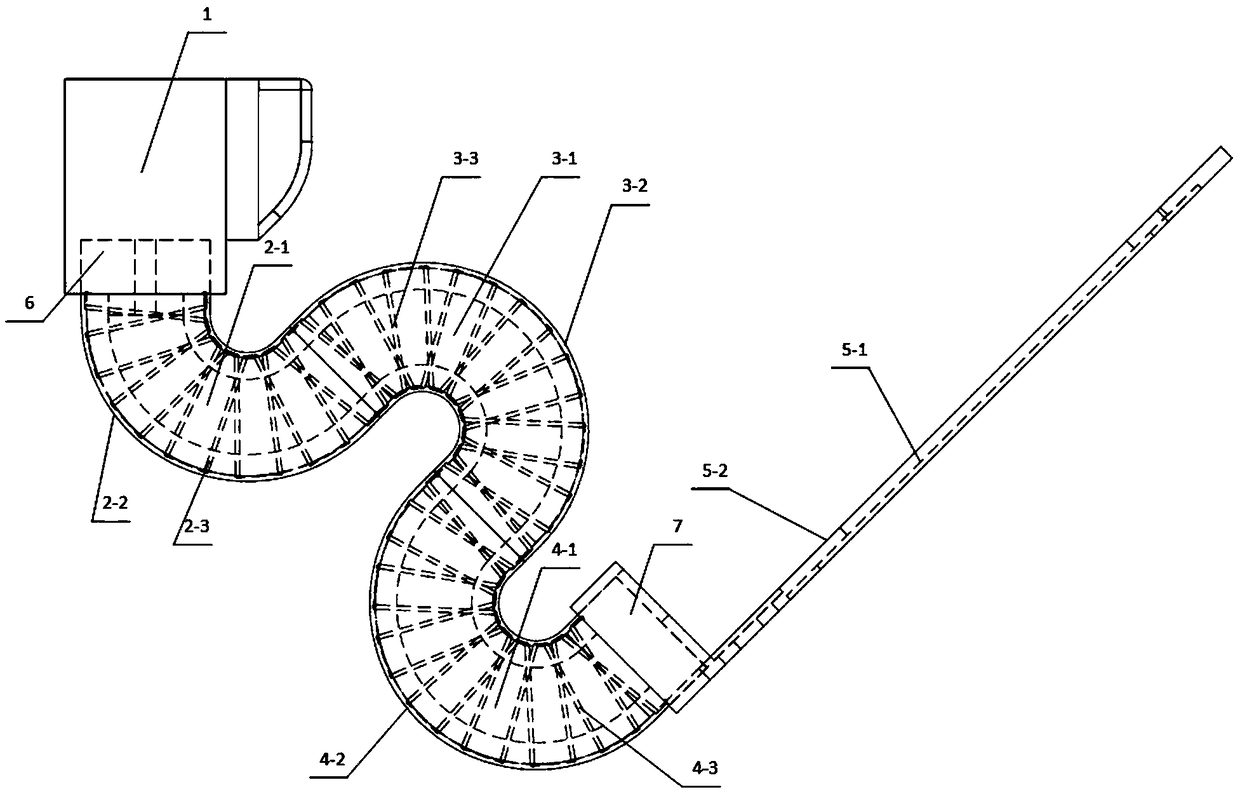
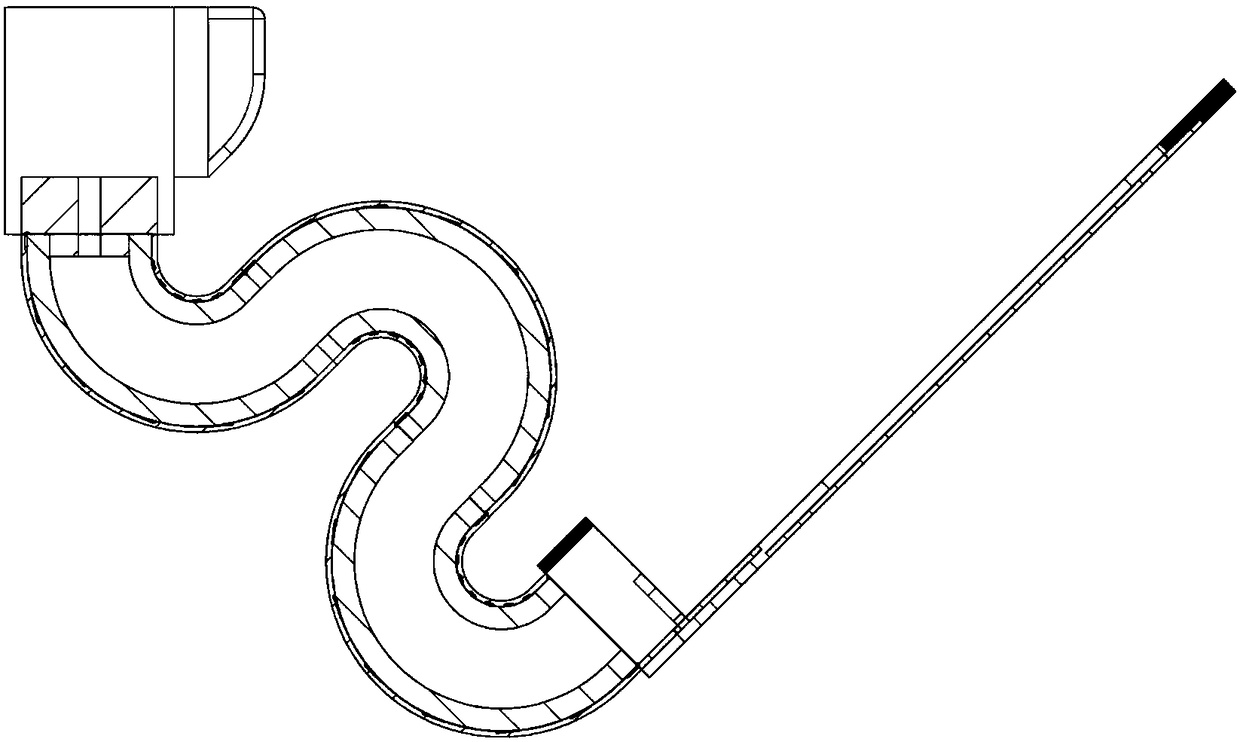
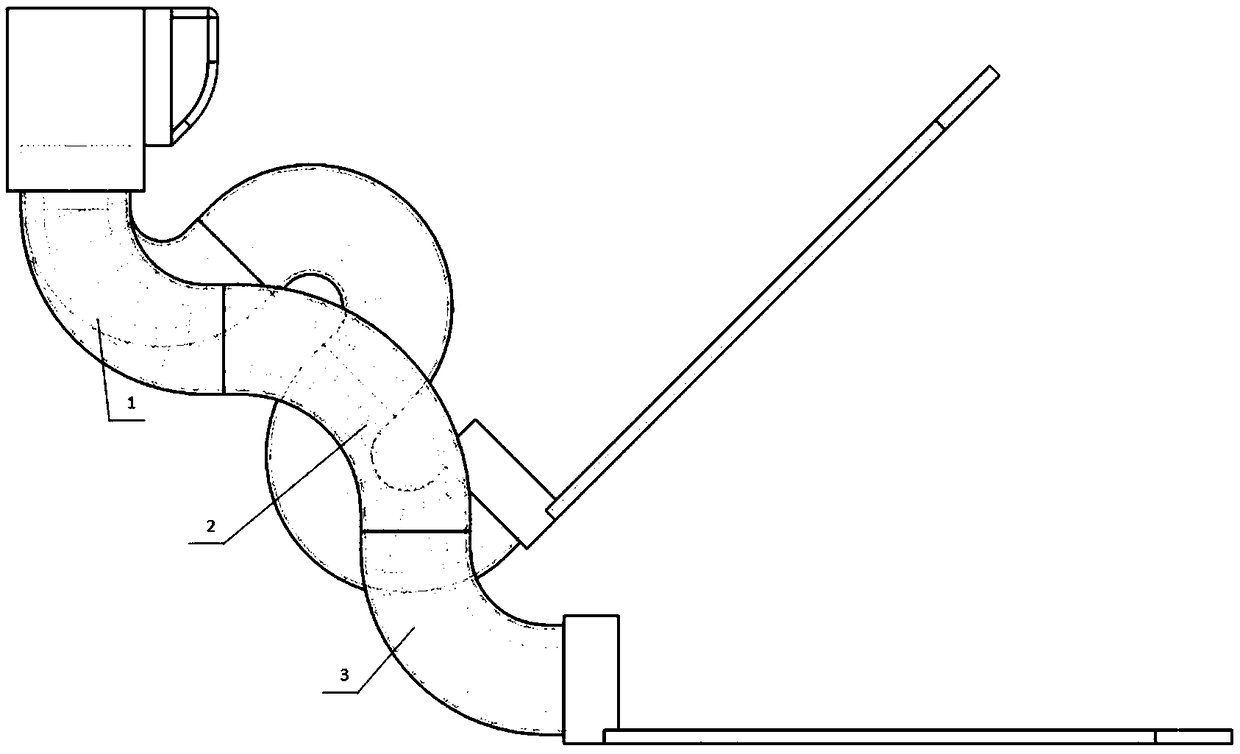
[0017] Specific implementation mode one: combine Figure 1 to Figure 4 Describe this embodiment. The imitation frog swimming leg using underactuated serial soft pneumatic bending modules described in this embodiment includes a main trunk connector 1, a hip joint 2, a knee joint 3, an ankle joint 4, hindlimb fins, and an air guide The blocking head 6 and the sealing blocking head 7, the hip joint 2, the knee joint 3, and the ankle joint 4 are connected end-to-end in turn to form an air channel, the hip joint 2 is connected to the main body trunk connection component 1 through the air guiding blocking head 6, and the ankle joint 4 passes through The sealing blocking head 7 is connected with the hindlimb flipper. The hip joint 2, the knee joint 3, and the ankle joint 4 are connected end to end to form an air guiding passage, and the main body of the hind limb forms an S-shaped airtight cavity through the air guiding blocking head 6 and the sealing blocking head 7, and is connecte...
specific Embodiment approach 2
[0019] Specific implementation mode two: combination Figure 1 to Figure 4 Describe this embodiment. The hip joint 2, knee joint 3, and ankle joint 4 of a frog-like swimming leg using underactuated serial soft pneumatic bending modules in this embodiment are all soft pneumatic one-way bending modules, and the three modules Connected in series to form the rear limb drive structure. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0020] Specific implementation mode three: combination Figure 1 to Figure 4 Describe this embodiment, the hip joint 2 of the imitation frog swimming leg adopting the underactuated serial soft pneumatic bending module described in this embodiment is composed of the hip joint elastic matrix 2-1, the hip joint strain limiting layer 2-2 and the hip joint Composed of fiber lines 2-3, the hip joint fiber lines 2-3 are spirally wound on the hip joint elastic matrix 2-1, and the hip joint fiber lines 2-3 are pasted on the hip joint elastic matrix 2-1, the hip joint strain The restrictive layer 2-2 is pasted on the outer arc surface of the elastic substrate 2-1 of the hip joint. The outer circle of the fiber line is sparse and the inner circle is dense. Other components and connections are the same as those in the first embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More