

A method for object recognition and registration based on event triggered camera and three-dimensional laser radar fusion system
An event-triggered, three-dimensional laser technology, applied in image data processing, instruments, computing, etc., can solve the problems of cloud sparse, unable to recognize the target, reduce the accuracy of target recognition, etc., to achieve small data redundancy, distance positioning information Stable and reliable, cost-effective effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The accompanying drawings are for illustrative purposes only, and should not be construed as limitations on this patent; in order to better illustrate this embodiment, certain components in the accompanying drawings will be omitted, enlarged or reduced, and do not represent the size of the actual product; for those skilled in the art It is understandable that some well-known structures and descriptions thereof may be omitted in the drawings. The positional relationship described in the drawings is for illustrative purposes only, and should not be construed as a limitation on this patent.
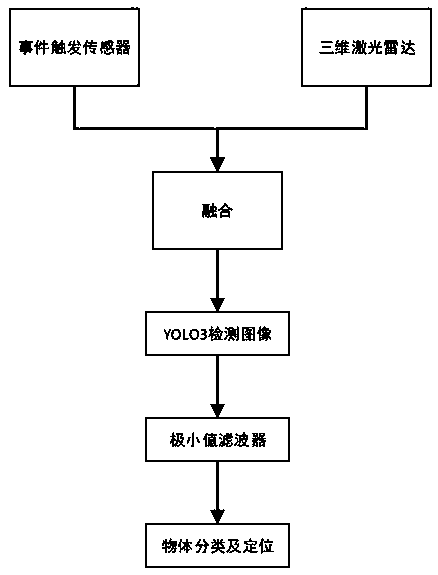
[0053] Such as figure 1 As shown, the present invention is based on an event-triggered camera and a three-dimensional lidar fusion system, which can accurately classify and locate objects in real time.
[0054] Step 1. The event triggers the camera and the 3D lidar to collect data respectively.
[0055] Step 2. The data fusion of the two sensors is performed through the internal cam...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More