

A method and a device for distributing surveying and mapping tasks of multiple unmanned aerial vehicles
A technology of multi-UAV and task allocation, applied in the field of UAV, can solve the problems of lack of interaction mechanism, difficulty in realizing distributed solution, lack of constraint processing mechanism in genetic algorithm method, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0129] In order to make the purpose, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
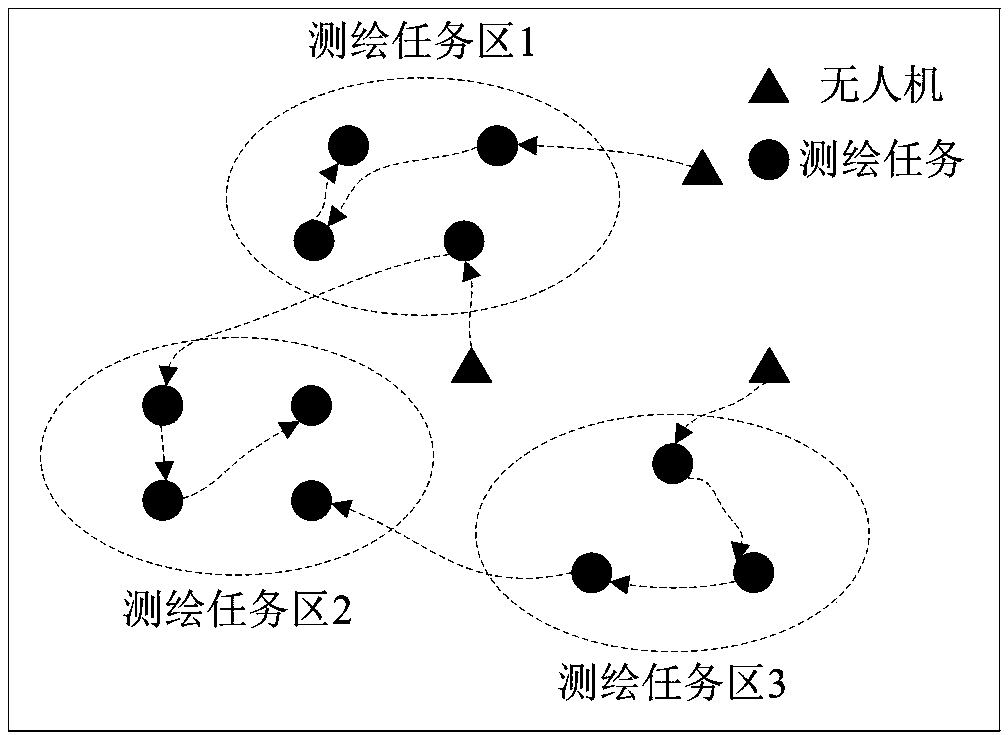
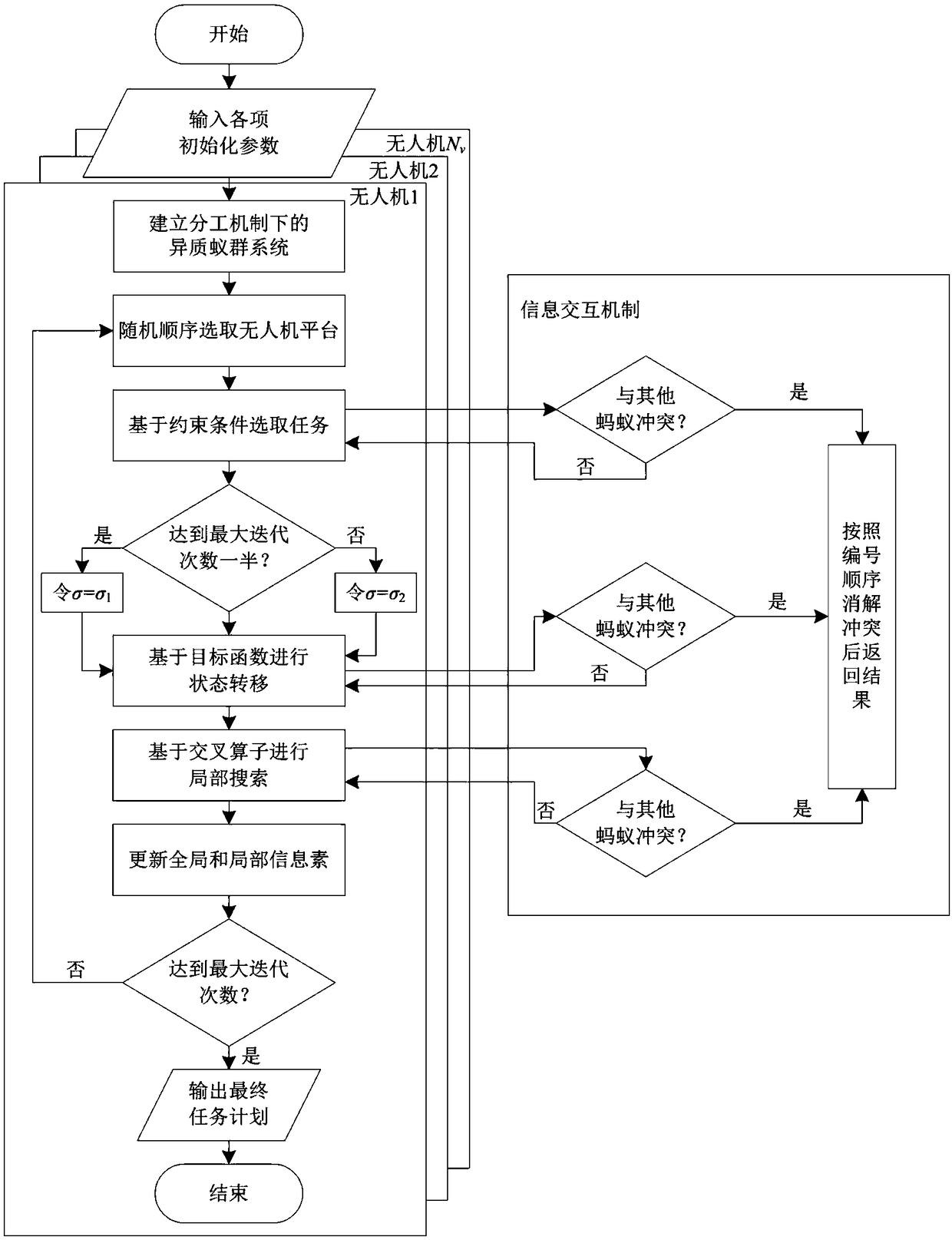
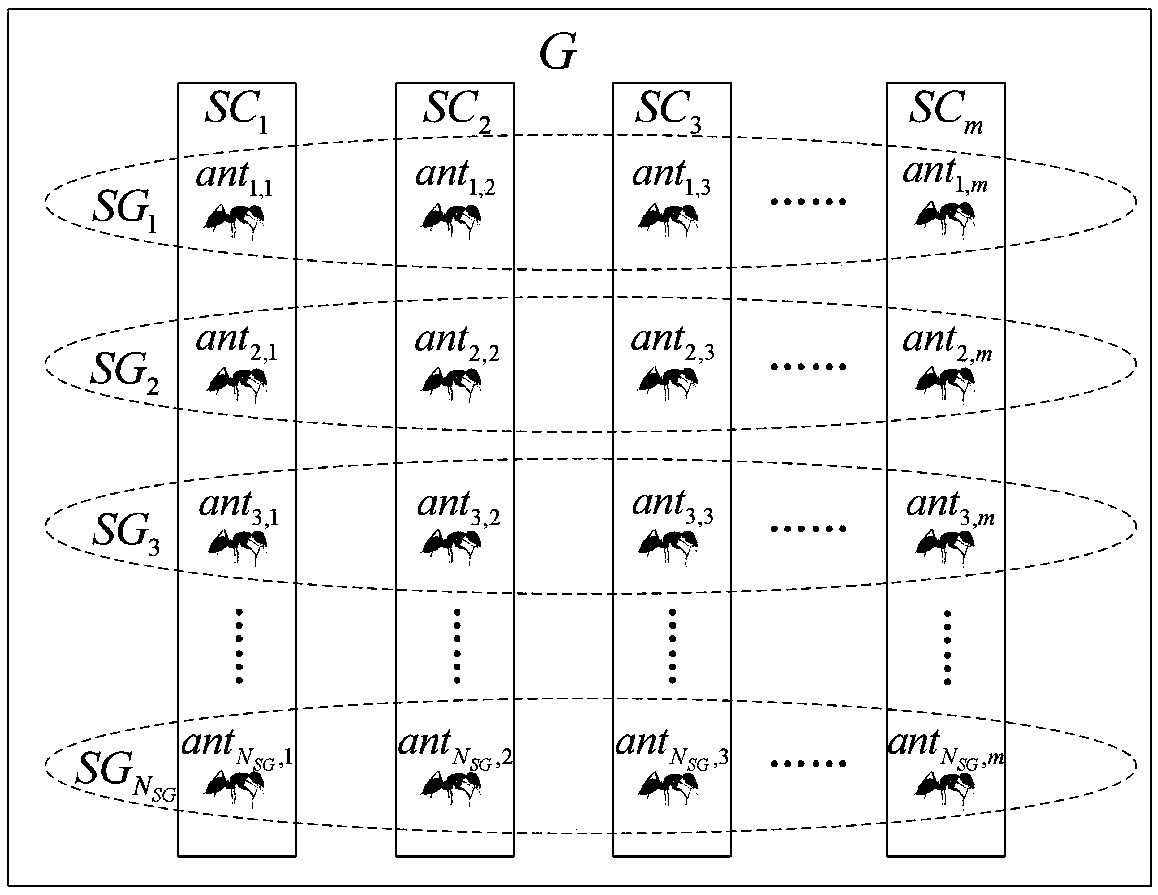
[0130] Such as figure 2 As shown, the present invention is based on the heuristic heterogeneous ant colony technology, and provides a resource scheduling method for multiple drones to multiple surveying and mapping tasks: first, determine the attribute information of the surveying and mapping system including drones and tasks; secondly, give Define the decision variables and resource scheduling measurement values, and analyze the optimization objectives and constraints, and establish a resource scheduling model; then, based on the heterogeneous division of labor ant colony technology, build a heterogeneous ant colony system corresponding to the UAV set; then, solve the heterogeneous ant colony system The heterogeneous ant colony system obtains th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More