

Sensorless elastic collision device and method based on industrial robot
An industrial robot, elastic collision technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as collision alarm, overload alarm, etc., to avoid damage, avoid overload alarm, and achieve good real-time effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be described in further detail below with reference to specific embodiments and accompanying drawings, but the embodiments of the present invention are not limited thereto.
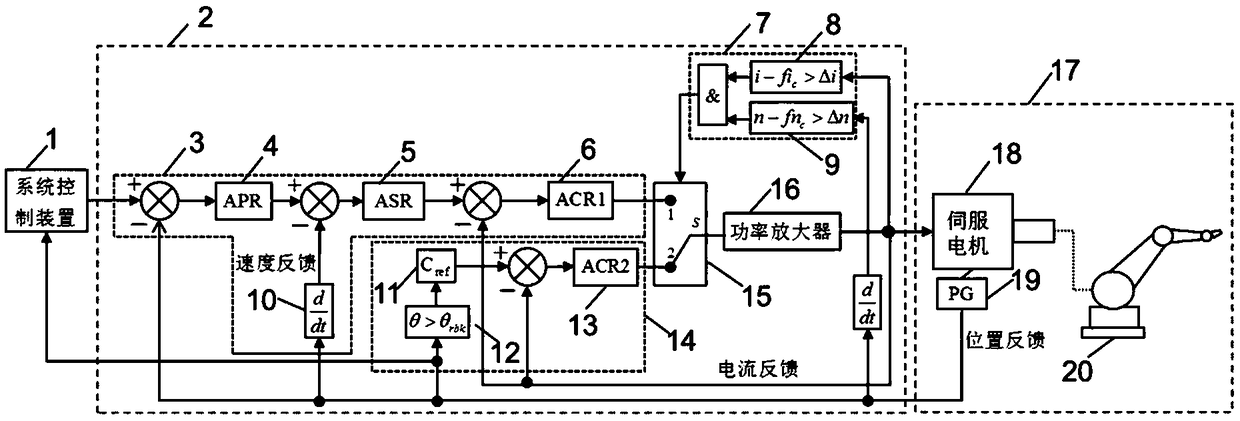
[0033] See e.g. figure 2 , The present invention provides a sensorless elastic collision device based on an industrial robot, which includes a system control device 1 , a motor servo drive device 2 and an industrial robot body 17 . The system control device 1 sends a joint position command to the motor servo drive device 2, and the motor servo drive device 2 outputs a power signal to drive the industrial robot body 17 to move.
[0034] See e.g. figure 2The motor servo drive device 2 is composed of a position speed current three-loop control device 3 , a composite control device 14 , a collision detection device 7 , a control device switch 15 and a power amplifier 16 .
[0035] The position speed current three-loop control device 3 receives the position command signal ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More