

Robot obstacle avoidance trajectory planning method and system based on deep learning
A technology of deep learning and trajectory planning, applied in control/regulation systems, instruments, two-dimensional position/channel control, etc., can solve problems such as high requirements for robots, impractical obstacles, and reduced utilization of factory production space , to achieve the effect of increasing production capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
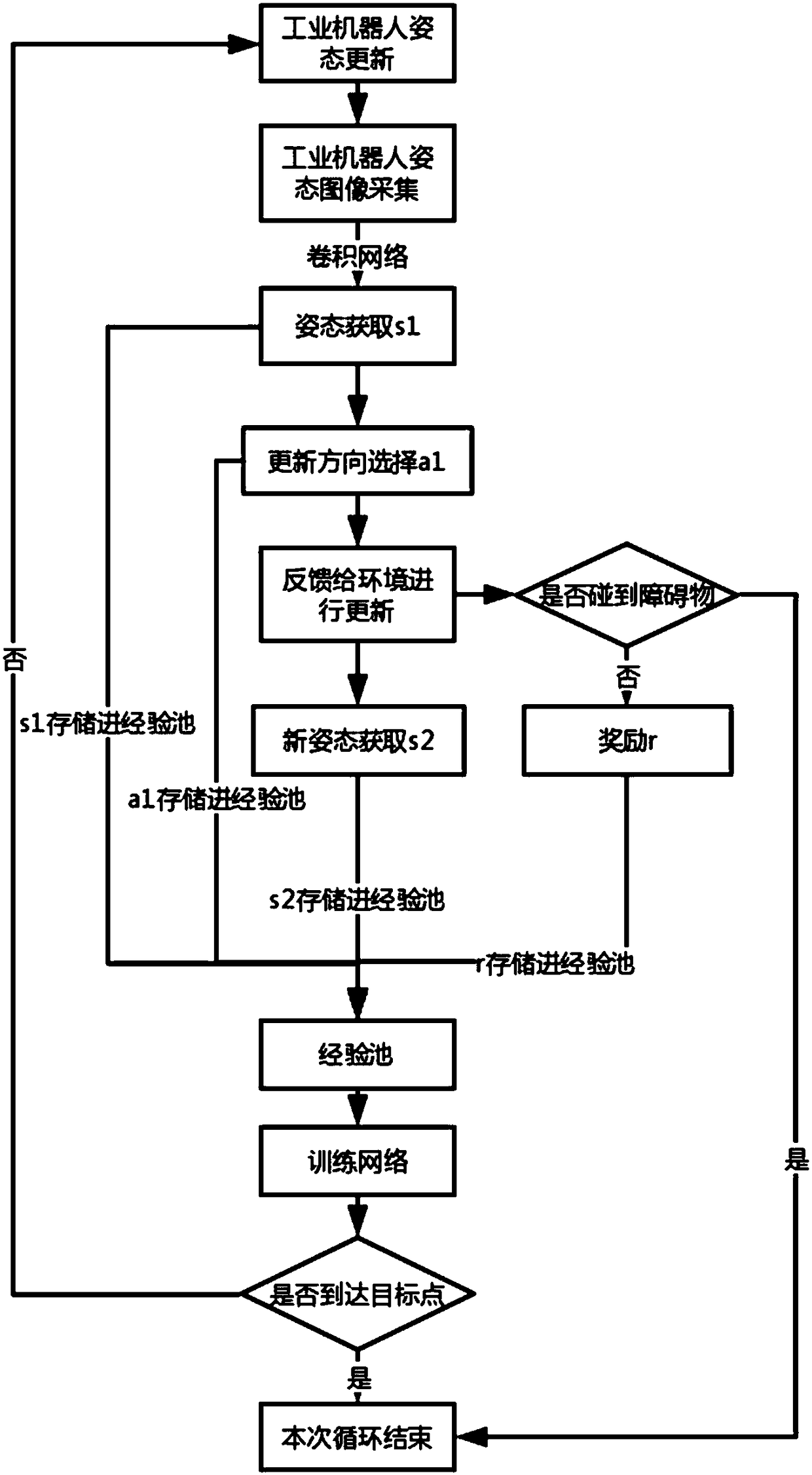
[0040] Such as figure 1 As shown, the present invention provides a robot obstacle avoidance trajectory planning method based on deep learning, including:
[0041] 1. Determine the initial situation of the algorithm, such as the position of the object, the position of the obstacle, and the parameters of each joint of the robot arm. Initialization is then performed on the initial conditions of the algorithm.
[0042] 2. The robot arm used in the algorithm is modeled with SolidWorks, and then the model i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More