

Piston pose estimation method based on improved CVFH and CRH features
A pose estimation and piston technology, applied in computing, image data processing, instruments, etc., can solve the problems of algorithm effect discount, high system cost, poor method adaptability, etc., achieve convenient template acquisition, strong algorithm adaptability, and improve accuracy rate effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] The present invention will be described in detail below in conjunction with accompanying drawings and examples.
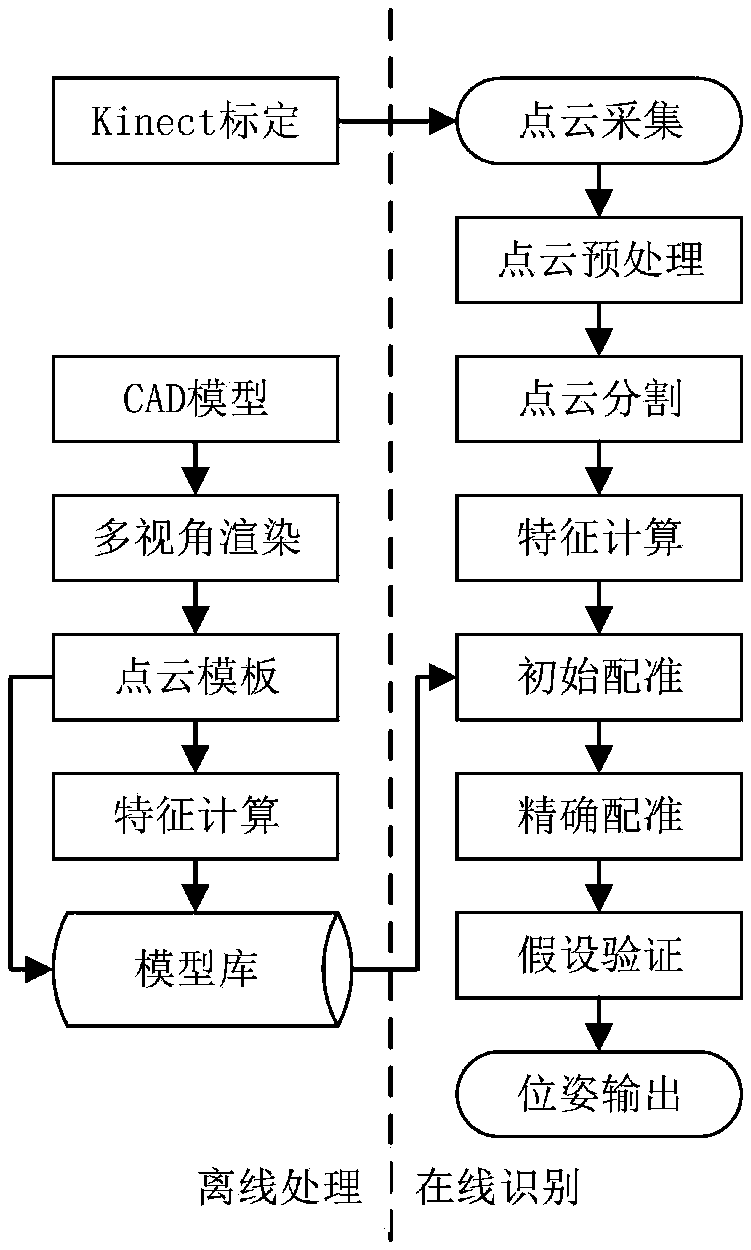
[0076] refer to figure 1 , a random stacking piston pose estimation method based on improved CVFH and CRH features, including the following steps:
[0077] 1) Offline processing: Offline processing only needs to be performed once when the device is installed, including the calibration of the Kinect camera and the automatic generation of the piston offline template library. The specific steps are as follows:
[0078] 1.1) Calibrate the Kinect camera, and complete the point cloud collection of randomly stacked piston surfaces: firstly, collect the color image and parallax image of the calibration plate through Kinect, and then use the corner points of the color image and depth image to analyze the color camera and depth image respectively. The camera is initialized and calibrated, and then the relative pose of the color camera and the depth camera is solved t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More