

Self-disturbance rejection controller designing method capable of overcoming gap nonlinearity
An active disturbance rejection controller, nonlinear technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as limit cycle oscillation, achieve simple implementation, avoid limit cycle oscillation, and good adaptability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0041] 1. Algorithm design and simulation:
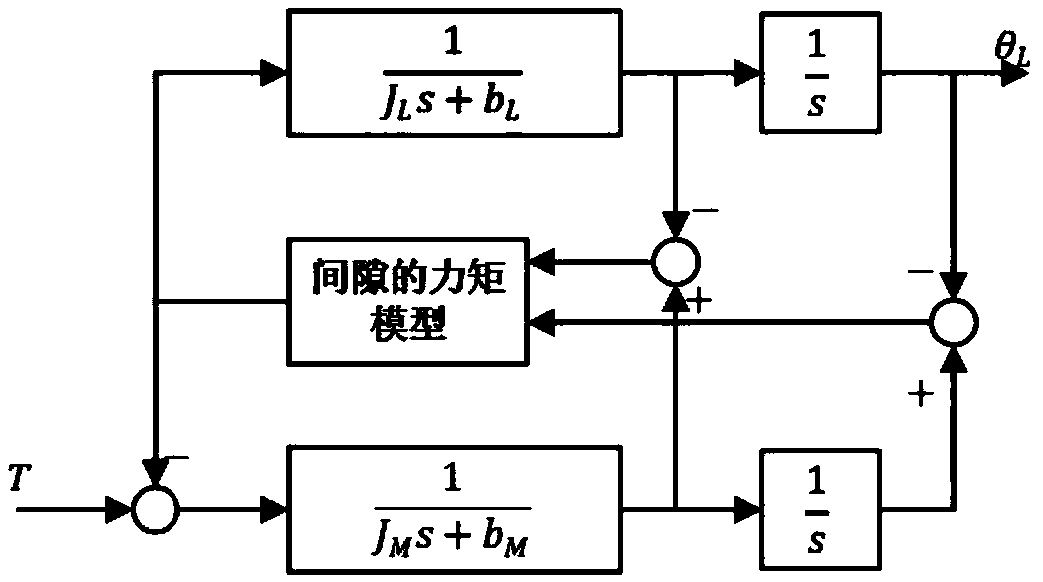
[0042] figure 1 It is a block diagram of a two inertia system (Two Inertia System) with a gap, and the nonlinear link of the gap exists in the gear transmission between the motor shaft and the load shaft, where J M is the moment of inertia of the motor, J L is the moment of inertia of the load, b M is the motor damping, b L is the load damping, T is the input torque, θ M is the motor shaft position output, θ L Output for the load shaft position. The moment model of the gap is:
[0043]
[0044] in, That is, the displacement difference between the motor shaft and the load shaft after being converted to the load side according to the transmission ratio, g r is the transmission ratio, T s is the shaft transmission torque, α is the size of the transmission gap, k and c represent the gear elastic coefficient and damping coefficient respectively.
[0045] First, the basic model of the controlled object is established, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More