

An Attitude Calibration Method of Moving Base Based on Autocollimation Tracking
A calibration method and self-collimation technology, which is applied in the field of inertial navigation system attitude calibration, can solve the problems of low system use efficiency, limited use range, and low dynamic accuracy, and achieve equipment simplification, wide measurement range, and fast dynamic response Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
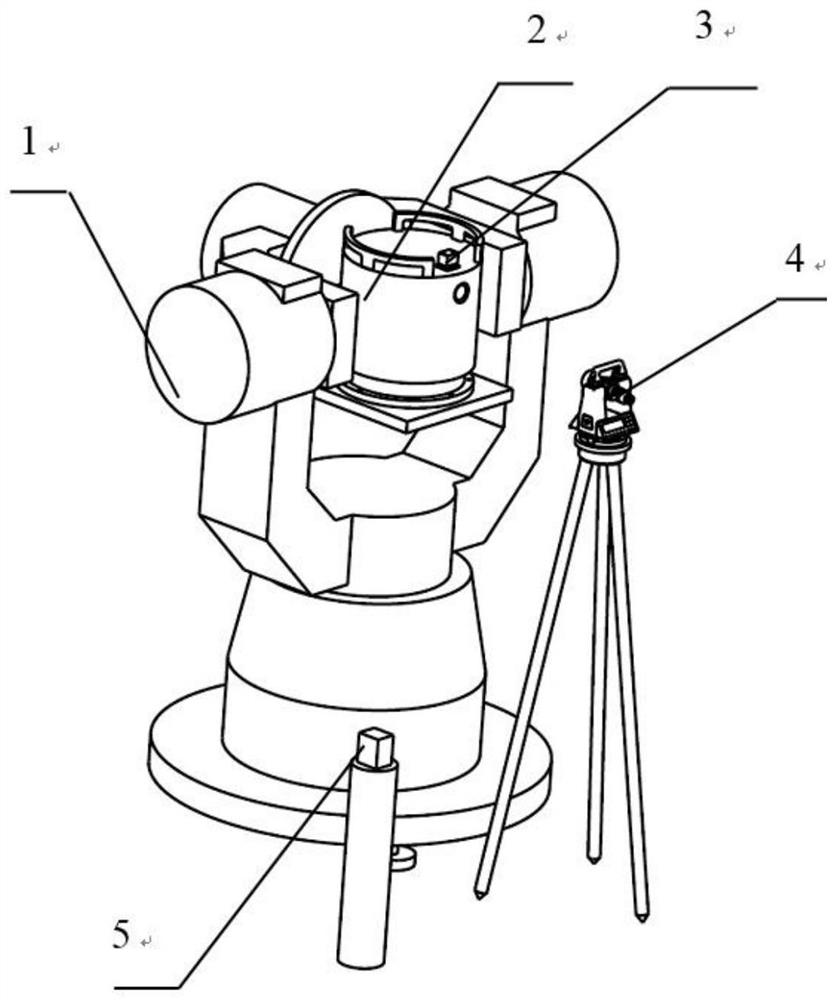
[0056] (1) During the static test, the three-axis rocking table 1 is locked to zero, the inertial navigation system 2 is powered on, and the initial alignment state is entered for 6 hours. After the initial alignment is completed, the three-axis rocking table 1 is indexed according to the static test conditions, and then turns to a fixed angle position to stop. After it is stationary, it starts to synchronously collect the pitch, azimuth and inertial navigation system of the dynamic auto-collimation tracking measuring instrument 4. The three-axis attitude angle of 2, the acquisition time is 1 minute, after the sampling is completed, the three-axis rocking table 1 turns to the next fixed position, the dynamic self-collimation tracking measuring instrument 4 moves the measurement position, and re-introduces the ground azimuth angle for synchronous acquisition. A total of 6 positions need to be transferred to collect. After all positions are collected, power off, wait for 5 minute...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More