

A vehicle driving assistance device and method
A technology for vehicle driving and auxiliary devices, applied in control devices, vehicle components, transportation and packaging, etc., can solve the problems of unable to detect the side of the vehicle, unable to calculate the length of the vehicle, and difficult to collide with protection, etc. The effect of reducing and avoiding side collision is required
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
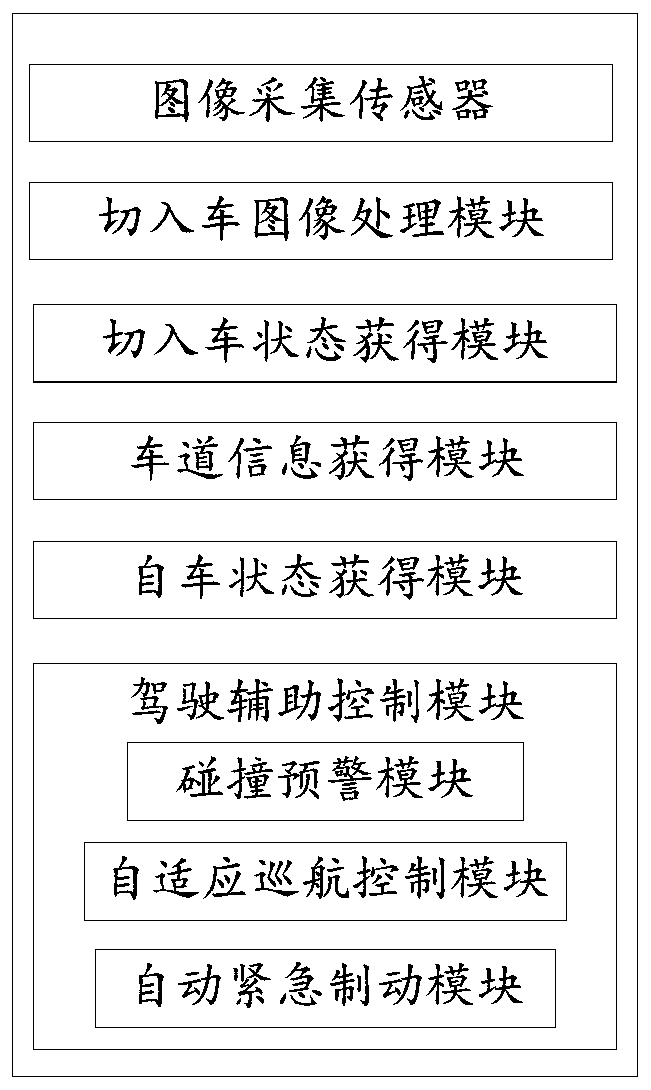
[0067] The embodiment of the present invention provides a vehicle driving assistance device, such as figure 1 As shown, the device includes: a self-car state acquisition module, an image acquisition sensor, a cut-in vehicle image processing module, a cut-in vehicle state acquisition module, a lane information acquisition module, and a driver assistance control module.
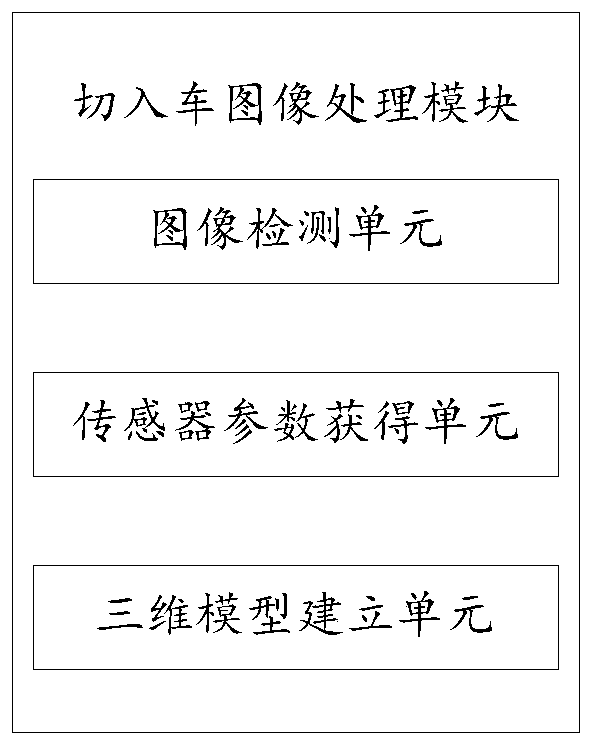
[0068] The self-vehicle status obtaining module is used to obtain self-vehicle status information, the self-vehicle status information includes vehicle speed information and direction information, the vehicle speed information may be obtained through a wheel speed sensor, and the direction information may be obtained through a steering wheel torque sensor. The image acquisition sensor is used to acquire cut-in vehicle image information, and the image acquisition sensor may be a camera. The cut-in vehicle image processing module is used to convert the cut-in vehicle image information into 3D structure information, a...
Embodiment 2
[0106] A feasible embodiment of the present invention provides a vehicle driving assistance method. Specifically, such as Picture 9 As shown, the vehicle driving assistance method includes:
[0107] S1. When a side vehicle cuts between its own vehicle and the vehicle ahead, collect the cut-in vehicle image information;
[0108] S2. According to the image information of the cut-in vehicle, identify the back and side of the cut-in vehicle, and obtain the back and side information of the cut-in vehicle;
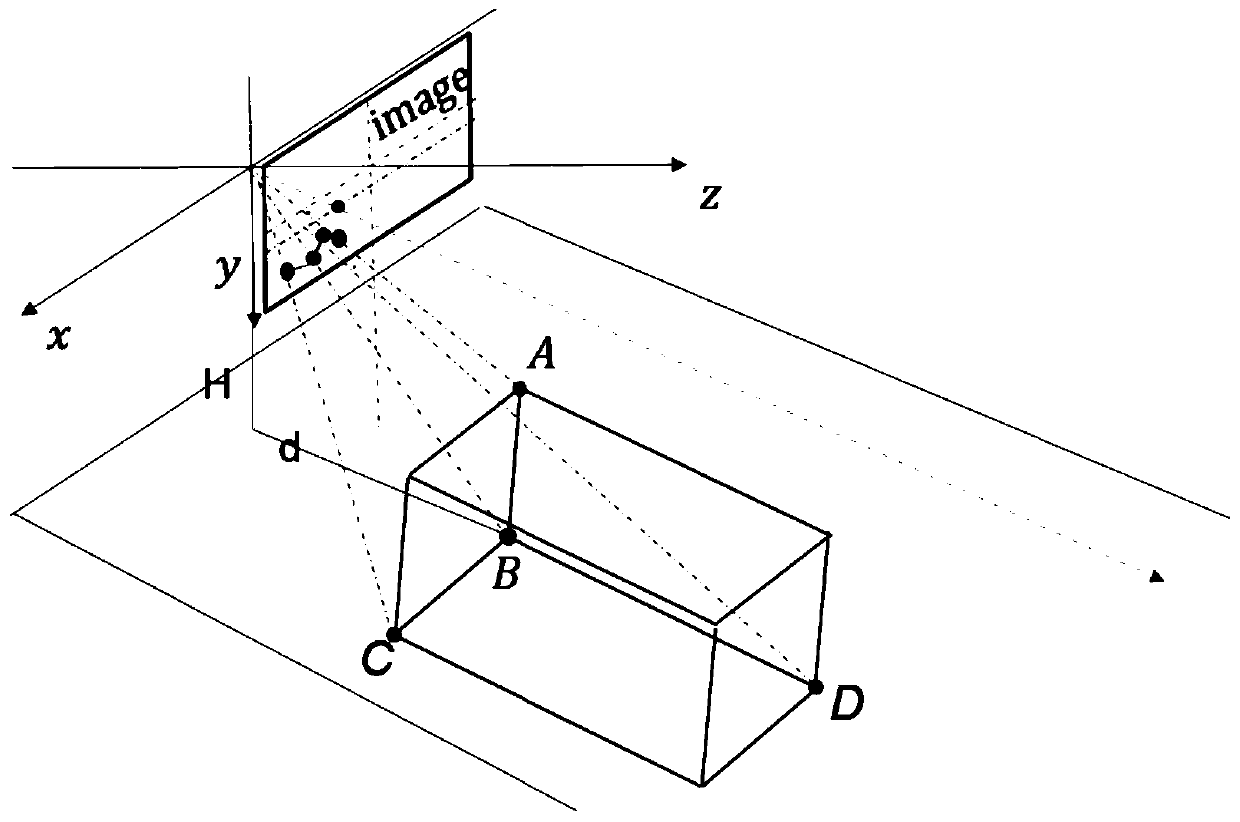
[0109] S3. Perform base point detection according to the rear and side information of the cut-in vehicle, obtain the base point position, and convert the base point position from the plane image to the three-dimensional space, and construct the three-dimensional model of the cut-in vehicle according to the position of the base point in the three-dimensional space ;
[0110] S4. Obtain the state information of the cut-in vehicle according to the three-dimensional model of the cut-in v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More