

Invisibility high-maneuvering target drone and control method of invisibility high-maneuvering target drone
A control method and large maneuvering technology, applied in the field of unmanned aerial vehicles, can solve problems such as poor stealth characteristics of target aircraft
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
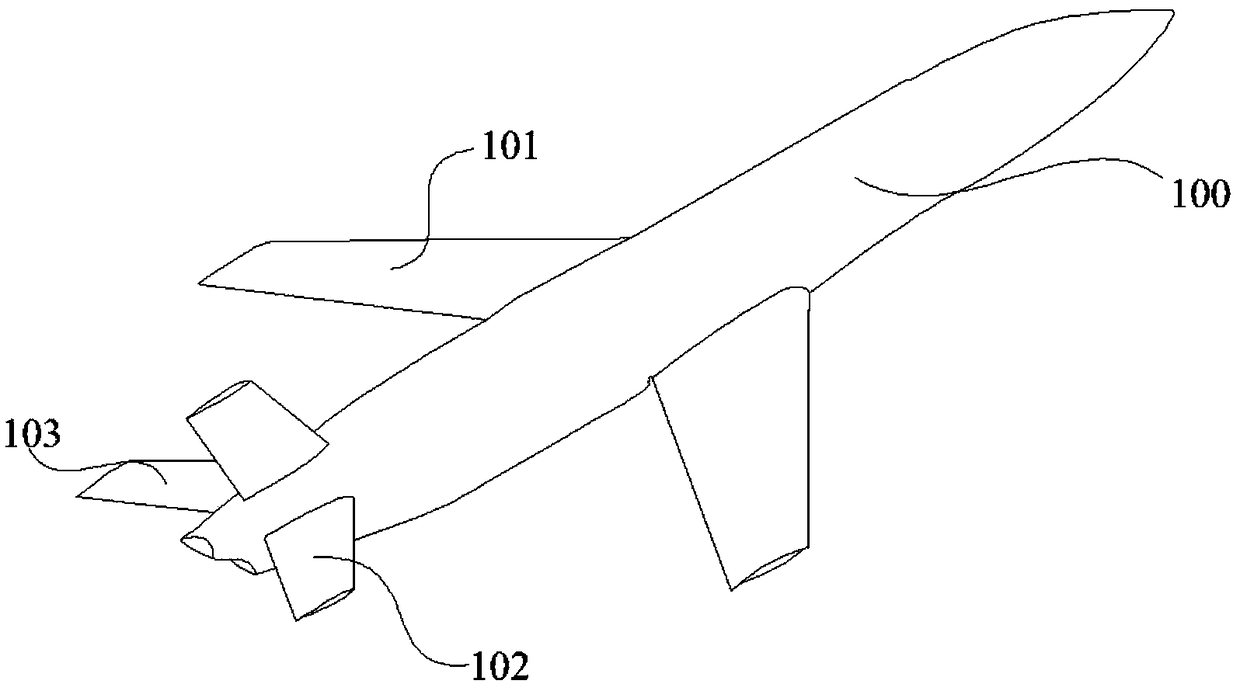
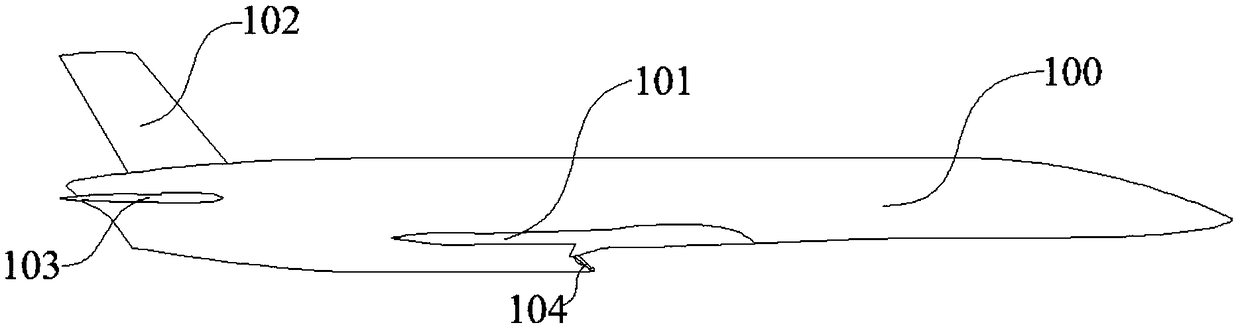
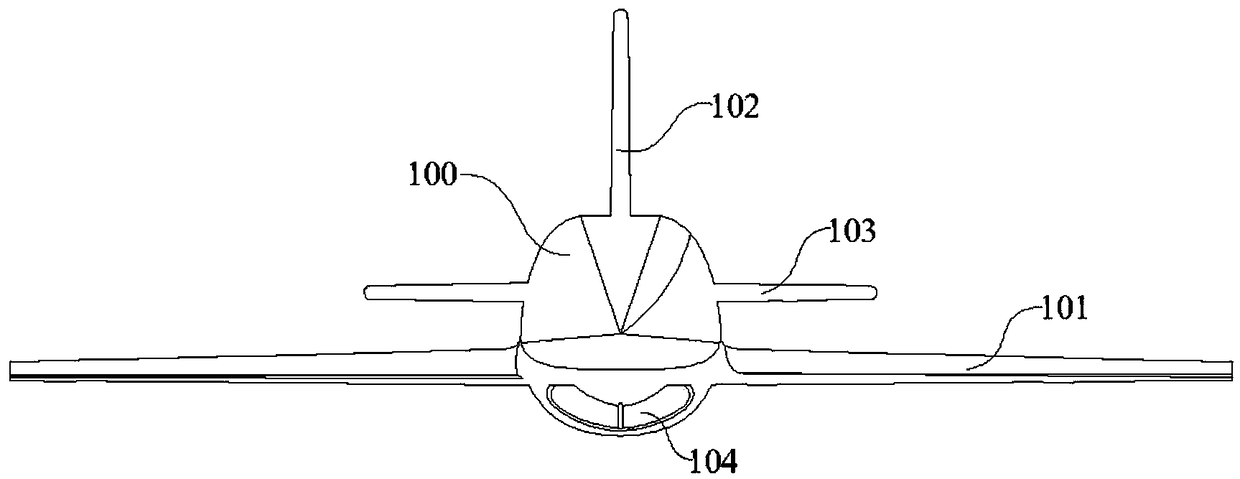
[0036] like Figure 1~3 as shown, figure 1 It is a schematic diagram of the three-dimensional structure of a stealth large mobile target drone according to an embodiment of the present invention, figure 2 It is a front view of a stealth large mobile target drone according to an embodiment of the present invention, image 3 It is a side view of a stealth large maneuverable target drone according to an embodiment of the present invention. The stealth large maneuverable target drone provided by the present invention includes a fuselage 100, a wing 101, a vertical tail 102, a horizontal tail 103, and a machine mounted on the fuselage 100. The "clamshell" air intake 104 under the abdomen, the wings 101 are arranged in the middle of the fuselage 100, the wings 101 are located on both sides of the fuselage 100 and are symmetrically arranged, the vertical tail 102 and the horizontal tail 103 are arranged at the tail of the fuselage 100 .
[0037] The angle range of the leading edg...
Embodiment 2
[0046] On the basis of Embodiment 1, this embodiment further provides a control method for a stealth large maneuvering target drone to solve the problem in the prior art that the comprehensive matching degree between the stealth design and flight performance of the target drone is not high.
[0047] A control method for a stealth large mobile target drone provided by the present invention comprises the following steps:
[0048] S1: Confirm the dynamic model with high accuracy and high confidence through system identification;
[0049] S2: Combined overload and attitude control to ensure stable control flight with large overload;
[0050] S3: The control system uses overload, speed, angle of attack and sideslip angle to ensure the safety of overload and maneuvering flight.
[0051] In order to verify the feasibility of the large overload control scheme, it is verified through digital simulation, semi-physical simulation and turntable simulation. The control method of this stea...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Angle | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More