

Estimation method of target motion parameter for mine platform
A motion parameter and target technology, applied in the field of target motion parameter estimation, can solve the problems that the positioning accuracy has a great influence, the underwater acoustic signal processing method cannot use the mine platform, and the concealment is high.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
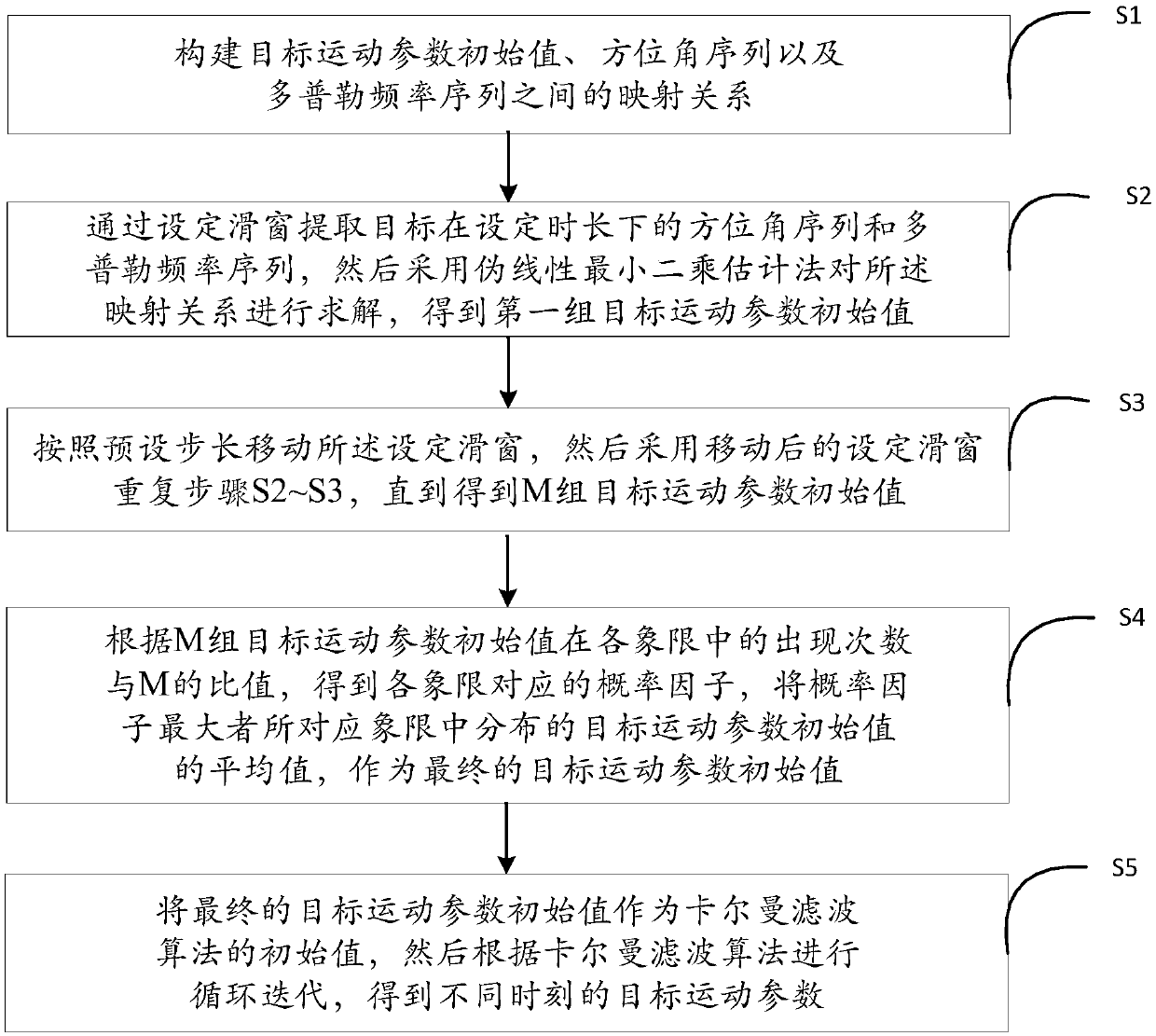
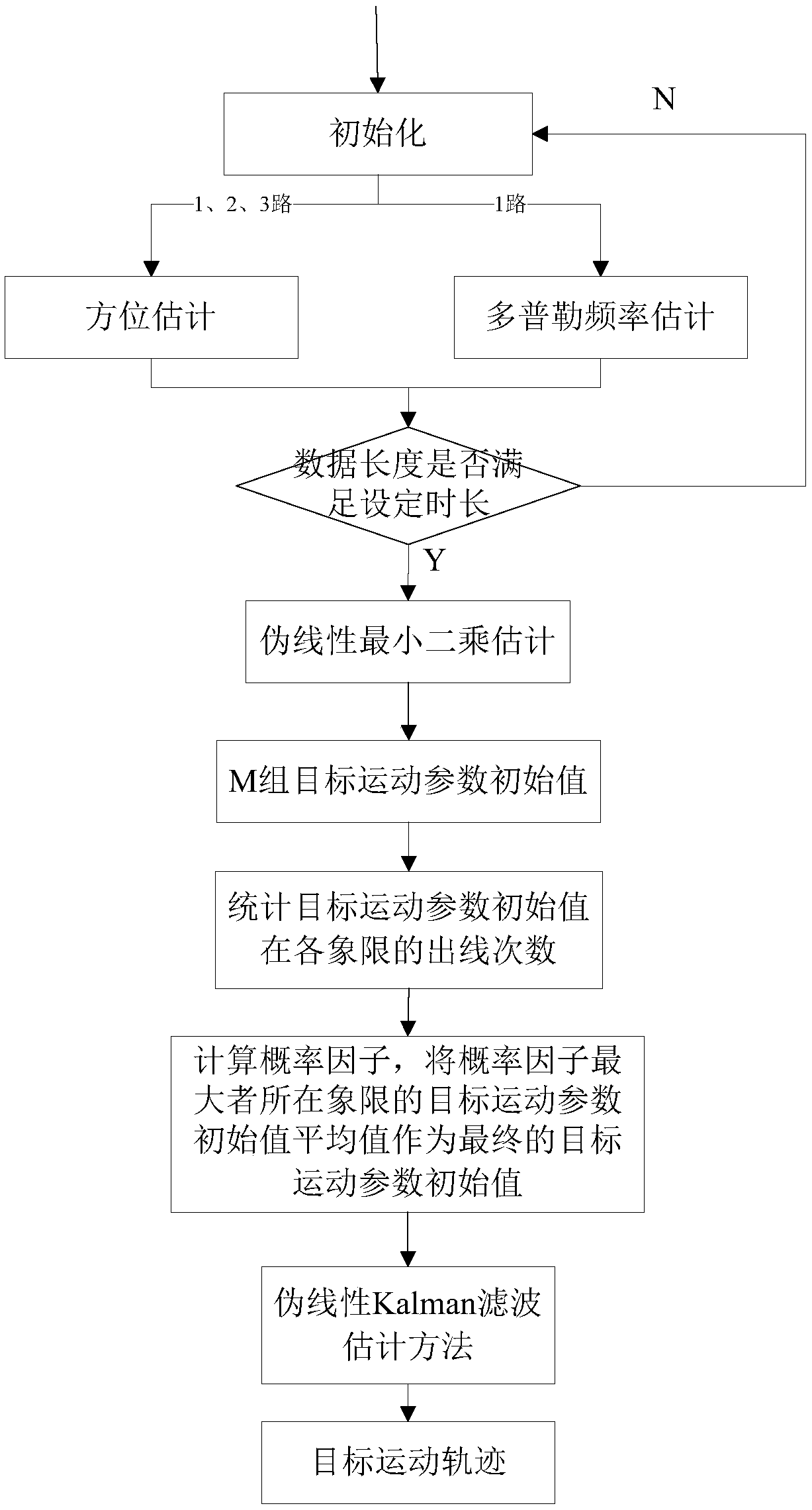
[0063] see figure 1 , which is a flowchart of a method for estimating target motion parameters for a mine platform provided by an embodiment of the present application. A method for estimating target motion parameters for a mine platform, comprising the following steps:
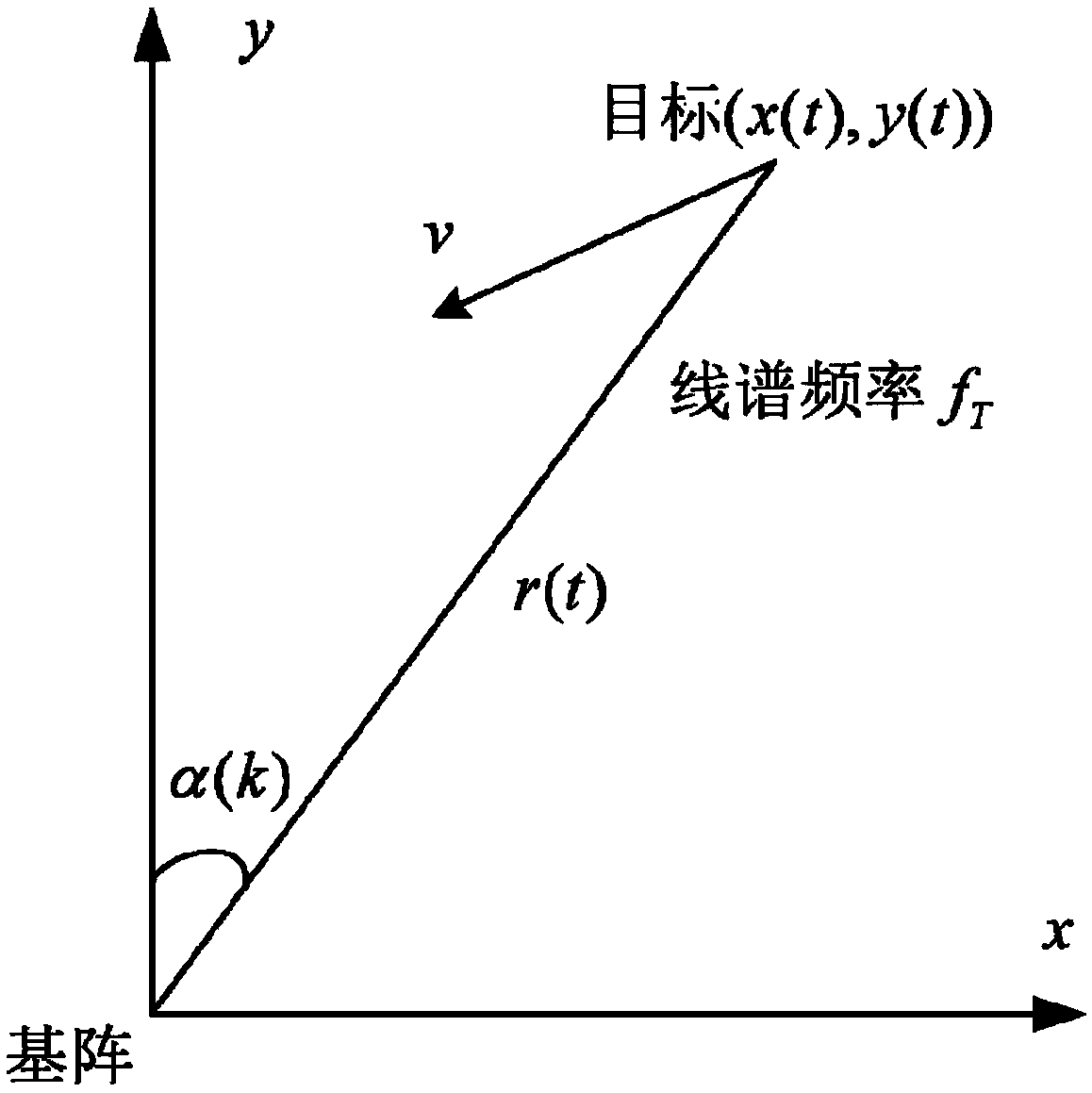
[0064] S1: Construct the mapping relationship between the initial value of the target motion parameter, the azimuth sequence of the target, and the Doppler frequency sequence, where the initial value of the target motion parameter is an unknown quantity in the mapping relationship, and the azimuth sequence and the Doppler frequency sequence is a known quantity in the mapping relationship.
[0065] S2: By setting the sliding window to extract the azimuth sequence of the target under the set time length {α m (k)} and the Doppler frequency sequence {f m (k)}, then the pseudo-linear least squares method is used to solve the mapping relationship to obtain the initial value of the first group of target motion pa...
Embodiment 2
[0158] Based on the above embodiments, this embodiment takes the surface ship as the target, and estimates the motion parameters of the surface ship.
[0159] The observation base array is a plane three-element array, which is deployed at a depth of 80m. The small boat is a surface target. The record time is 410s, the distance is 99.94m, and the speed is 7.97kn, about 4m / s.
[0160] Figure 4 gives the real track of the surface ship target, where 1 # The base array is a planar three-element base array, the target's frontal and horizontal distance is 99.9m, and the target track and measurement base array layout position are given by GPS. GPS outputs one point per second, and the radial distance between the target and the measurement array is given by two direct GPS measurement points, and the GPS measurement accuracy is within 3m.
[0161] Perform the following data processing:
[0162] Take the sampled data of 3 primitives.
[0163] Select the filter frequency band to filt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More