

Exoskeleton robot assist control system and method based on fusion of myoelectricity and inertial navigation signals
An exoskeleton robot, electromyographic signal technology, applied in memory systems, program control design, instruments, etc., can solve problems such as time-consuming training, poor comfort during human-computer interaction, and unstable control effects of exoskeleton robots. Accurate intent recognition, stable control process, and good human-computer interaction comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
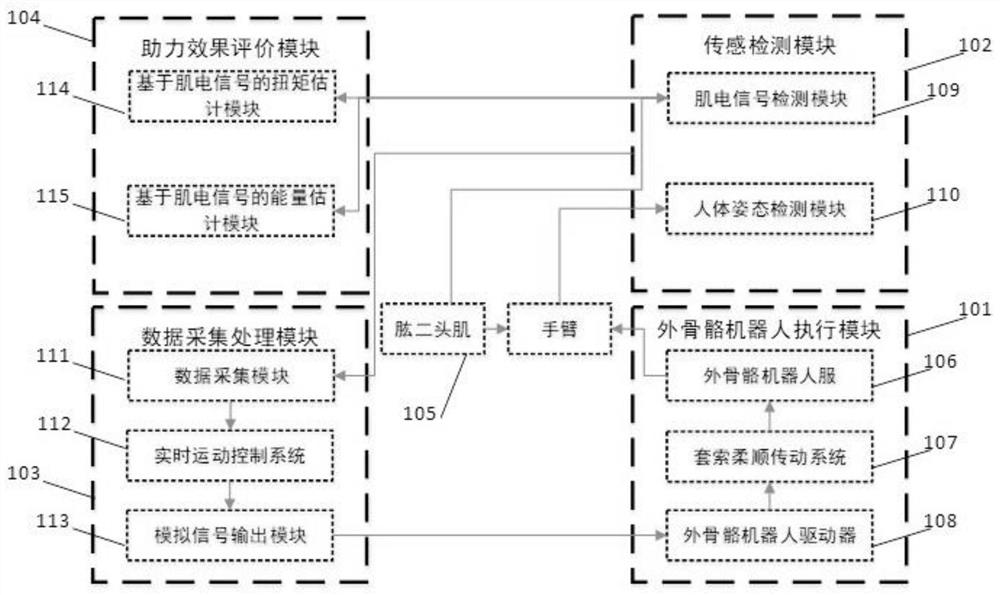
[0062] Such as figure 1 Shown is an exoskeleton robot power assist control system based on the fusion of myoelectric signals and inertial navigation signals, including a sensor detection module 102, a data acquisition and processing module 103, and a power assist effect evaluation module 104;
[0063] The sensing detection module 102 includes a myoelectric signal detection module 109 and a human posture detection module 110 . Wherein, the electromyographic signal detection module 109 adopts the electromyographic signal sensor to detect the electromyographic signal of the biceps brachii of the human upper limb; For data processing, the real-time joint angle of the wearer during the movement is obtained through the joint angle estimation strategy based on the inertial navigation signal.
[0064] The data collection and processing module 103 includes a h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More