

Alignment method of INS/GNSS/polarization/geomagnetic integrated navigation system based on least squares
An integrated navigation system and least squares technology, which is applied to navigation, navigation, surveying and navigation through speed/acceleration measurement, can solve the problems of poor signal synchronization, dependence, and low precision of inertial navigation systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
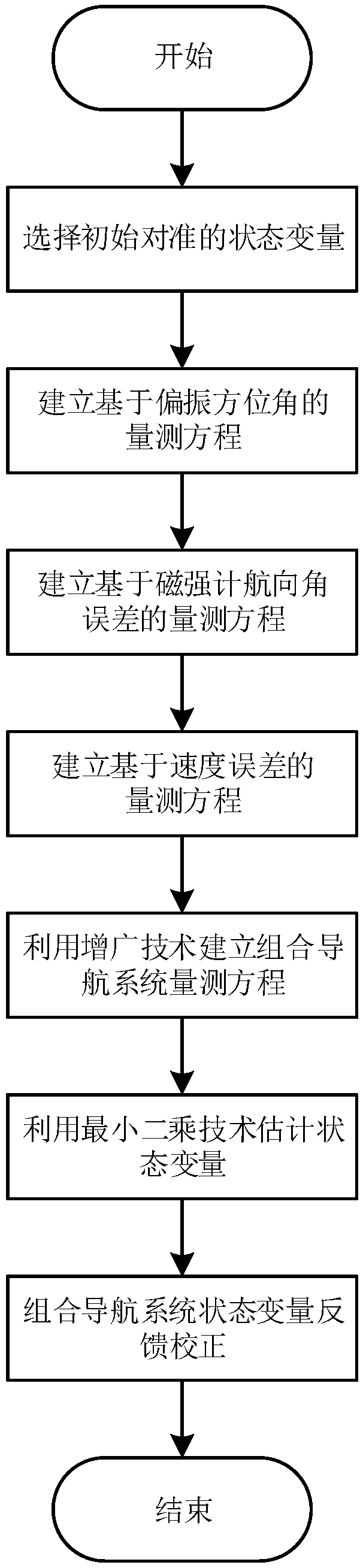
[0082] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
[0083] like figure 1 Shown, the specific implementation steps of the present invention are as follows:
[0084] The first step is to select the state vector of the INS / GNSS / polarization / geomagnetic integrated navigation system:
[0085]
[0086] Among them, φ E , φ N , φ U are the eastward, northward and skyward misalignment angles respectively; δV E , δV N , δV U are eastward, northward and skywise speed errors; δλ, δL, δh are longitude, latitude and height errors respectively; ε x , ε y , ε z It is the carrier coordinate system, that is, the gyro constant value drift under the b system, the origin O of the carrier coordinate system coincides with the center of mass of the carrier, the positive direction of the x-axis is in the same direction as the positive direction of the carrier, the y-axis points to the left along the longitudinal ax...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More